(90)AntiopeによるTYC1895-01450-1の食の解析
宮下和久
初稿 2008.2.2
改訂 2008.2.3
I.はじめに
せんだい宇宙館の早水氏より、2008年1月3日(JST)の(90)AntiopeによるTYC1895-01450-1の食について、国内で観測されたビデオをお送りいただいた。また、北崎勝彦氏、内山茂男氏からもビデオファイルをお送りいただいた。これらについて、Limovieを用いて解析を行った。
なお、恒星TYC1895-01450-1はKO型の巨星であるとされているが、小惑星の動きが速いことから瞬間的な現象が多く、星食現象からは恒星の視直径を推定することはできなかった。そこで、この観測において恒星の視直径は充分小さいと考え、以下の解析では恒星を点光源として扱う。
II.現象時刻の整約結果
この現象のまとめが、 せんだい宇宙館の星食観測のページ に掲載されている。
また下図は、ビデオ観測について、Dave
Herald氏作のOCCULTにより整約をおこなったものである。
|
|
1. Norio Sasanuma ; Toshima, Tokyo, Japan
2. Katsuhiko Kitazaki ; Musashino, Tokyo, Japan
3. Masahisa Yanagisawa, Yuki Shimokawa, Yohei
Yokoyama;
The Univ of Electro-Communications(UEC), Chofu,
Tokyo, Japan.
4. Takuya Ohkawa, Tsutomu Tanabe; Kawasaki,
Kanagawa, Japan
5. Shigeo Uchiyama, Sodegaura, Chiba, Japan
6. Mamoru Urabe; Kamogawa, Chiba, Japan
|
図1 ビデオ観測の整約図 (OCCULT
Ver3.6による)
III.各観測ビデオの解析
1.笹沼範夫氏の観測
笹沼氏の観測ビデオは、音声信号による時刻記録となっており、その解析を行うことに加えて、小惑星の北限を決めるために、減光の有無についての解析が必要とされた。以下にそれぞれの解析結果を示す。
(1) 時刻の解析
固定電話の時報の録音による時刻記録である。下図は、解析に用いたファイルのNo.556フレームの音声信号のようすである。赤い線で描かれた音声波形で、時刻信号の開始がほぼ中央にある。電話時報が正確であると仮定した場合、前後のフレームと信号のタイミングの関係から、このフレームの露出中央時刻は17h40m46.999sと求められる。早水氏の解析では、この観測地点に小惑星の影が最も近づいたのは
17h40m47s
であるということであるから、減光が起こったのであればこのフレーム付近のはずである。
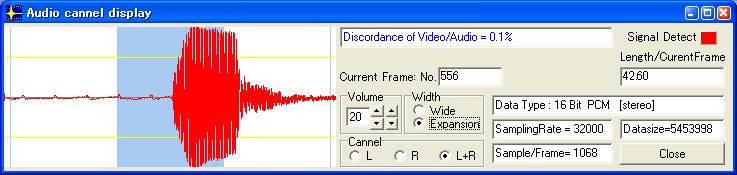
図2 Limovieの音声信号解析機能 Audio
Channel Display による表示。
(2)
光量変化(掩蔽による減光の有無)
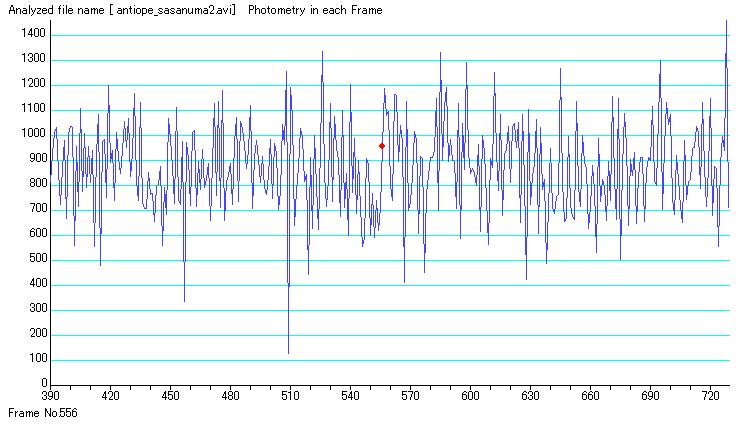
図3 笹沼氏の観測ビデオの光量変化
図3は、Limovieによる測定結果である。赤い点は、露出中央時刻が17h40m46.999sのフレーム(No.556)を示す。
このフレームの直前に、光量の低下が認められるが、同様の形の低下はNo.440フレーム付近にも起こっており、No.550付近の光量低下が星食によるものであるということはできない。図4は、Moving
Average と
FFTによるローパスフィルターにかけたものである。小惑星が付近を通過したと思われる時刻(赤い点)付近に見られるような光量低下は、他の時刻においても見ることができることから、シンチレーションによるものである可能性が高い。
なお、小惑星の縁からどれだけ離れたところまで影響があるか、については、後述の図18にあるように、この現象の場合、1フィールドで光量が約半分になる。光が半分になれば何かが通ったことが観測から見出せるとすると、その時間に速度を乗算して求めた長さが、影響のある範囲に当たる。今回の場合 15000m/s
* 1/60sec =
250m となり、幾何学的には小惑星の影に入っていなくても、250m横を「小惑星の幾何学的な影の縁」が通り過ぎた場合には検知できる、と考えられる。笹沼氏の観測地点は、それより外側に外れた場所であったと考えられる。
図4 ノイズ低減処理の結果
2.大川拓也氏の観測
この解析は、1.ビデオに記録された音声時刻からフレームの記録時刻を正確に知る。2.シンチレーションの大きい観測画像から、現象時刻を求める。ことを目的におこなった。
(1)
音声信号とフレームの記録時刻
大川氏は、 PJP
(中野太郎氏作の星食記録ソフトウエア)
により、パソコンからのPPS音声出力をビデオに記録した。この音声信号については、時刻の検証がなされていないということだが、ここではこの時刻がUTCと同期していると仮定して解析をおこなう。
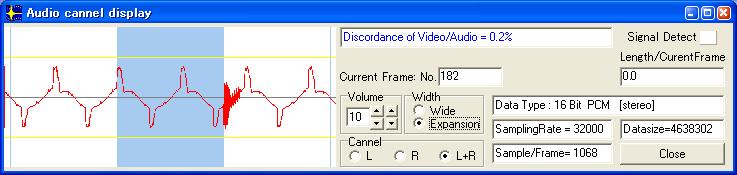
図5 PJPの音声秒信号
音声信号の解析には、LimovieのAudio
channel display を用いる。図5は、No.182フレームの表示である。
このフレームの露出終了時刻が、音声秒信号の開始時刻と一致しており、露出終了が正秒におこなわれたことを示している。従って、このフレームの露出中央時刻はそれより17ミリ秒前である。ただ、PJPには正分を表す信号がない。また、あったとしてもそれぞれの信号が何時何分かを知ることができない。大川氏は、ビデオレコーダーの時計を秒単位で一致させるように設定して観測をおこなっている。したがって、減光が起こったビデオのフレームに記録された時刻をカムコーダーのモニターから読み取り、その値をもとに時刻を調べればよい。
これをパソコン上から調べるには、Area61ビデオブラウザを使うと便利である。AVIファイルを読み込むとフレームに記録されたカムコーダの時計の時刻が表示される。図より、No.175フレームが2:41:38と記録された最後のフレームであり、それ以降は、No.182フレームも含めて2:41:39と記録されたことを示している。カムコーダーの時計は、正秒信号より7フレーム早く切り替わるタイミングでセットされていたと考えらる。
図6 Area61ビデオブラウザにより、パソコン上から記録された時計表示を読み取る。
以上から、No.182フレームの露出中央時刻は、17h41m38.983s
と考えられる。このフレームを基準として以下の解析を行う。
(2)
現象時刻
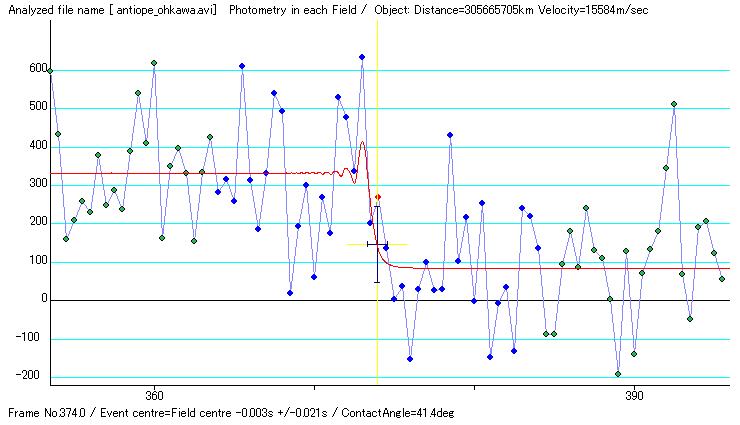
図7 大川氏観測の潜入時の光量変化
フィッティングより、現象中央時刻はNo.374.0
Fieldの露出中央時刻から、3ミリ秒前、誤差
21ミリ秒の結果を得た。この場合に仮定されているコンタクトアングルは41.4度である。
ここで、時刻の求め方について考えると、あるフレーム(fc)
の露出中央時刻tc
は、基準とするフレーム(fo)の時刻
to から、次のように求めることができる。
tc
= to + (fc – fo)/29.97
この場合は、tc=
17h41m38.983s + (374-182)/29.97 = 17h41m38.983s + 6.406s =
17h41m45.389s
である。フレーム番号374.0の”.0”は、このフィールドが先に露光されたフィールドであることを示す。したがって、フィールドの露出中央時刻は、フレームの中央より0.008秒前であり、
17h41m45.381s
である。これに、上記のオフセット値を加算して、現象時刻、17h41m44.378s
+/- 0.021s を得た。
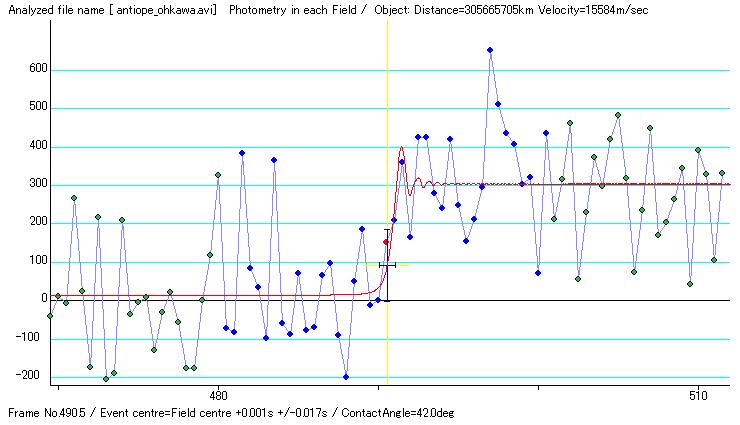
図8 大川氏観測の出現時の光量変化
出現では、No.490.5 のフィールドを基準にして、+1ミリ秒(0.001秒後) 誤差+/-17ミリ秒を得た。 コンタクトアングルは42.0度を得た。これより、潜入時と同様に、
tc= 17h41m38.983s + (490-182)/29.97
= 17h41m38.983s + 10.277s = 17h51m49.260s
これより、現象時刻として、17h51m49.261s
+/- 0.017s を得た。
|
現 象
|
大川氏の読み取り値
|
解析値
|
|
潜 入
|
17h
41m 45.33s
|
17h
41m 45.381s +/- 0.017s
|
|
出 現
|
17h
41m 49.30s
|
17h
41m 49.261s +/- 0.017s
|
表1 得られた現象時刻
これより、シンチレーションにより星像を把握しにくい画像であるにもかかわらず、大川氏の現象時刻の読み取りが、たいへん精度よく行われていたことがわかる。
3.電気通信大学の観測
ノイズやシンチレーションの影響も少なく、たいへん安定した画像である。時刻はGHS
+
TIViによるものであることから、Limovieの自動化機能を用いて解析を行う。現象は比較的ゆっくりとしていることから、コンタクトアングルの推定も試みた。
(1)
潜 入
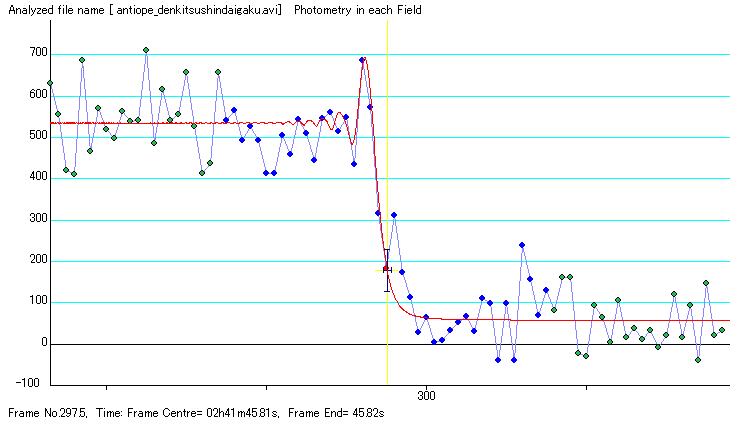
図9 潜入の光量変化
フィッティングの結果から、 現象時刻は No.297.5
フィールド+ オフセット
2ミリ秒 誤差+/-
8ミリ秒 コンタクトアングル 61.0度を得た。
ここで基準となるフィールドは、後から露光されたものであるから、露出中央値は 17h
41m 45.805s である。これにオフセット値を加え、測定は小数点以下2桁であるので、現象時刻は 17h
41m 45.805s +0.002s
= 17h 41m 45.807s であり、桁数を戻して、 現象時刻 17h
41m 45.81s +/- 0.01s を得た。
なお、ライトカーブがNo.298.0フレームにもう一つのピークをつくっており、これが何を表すのか気になるところである。地形の影響や重星、ビデオ画像のノイズなどいくつかの要因が考えられるが、明確に見えるのはこの1例だけであり、要因を特定することはできない。
(2)出 現
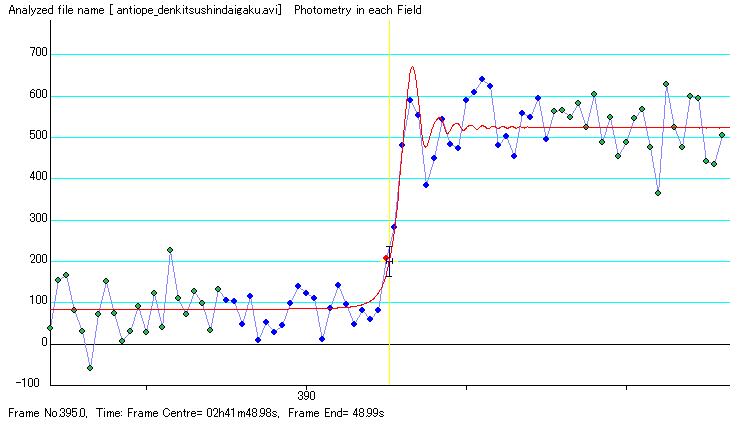
図10 出現の光量変化
フィッティングの結果から、 現象時刻は No.395.0
フィールド+ オフセット
5ミリ秒 誤差+/-
7ミリ秒 コンタクトアングル 62.5度を得た。図には記載してないが、No.394フレームの露出終了時刻は17h
41m 48.96sである。これより、No.394.0フィールドの露出中央時刻は、17h
41m 48.97s であり、現象時刻はオフセット値を加えて、 17h
41m 48.975s 、これを2桁にして、
17h 41m
48.98s +/- 0.01s である。
4.北崎勝彦氏の観測
北崎氏のビデオの特徴は、図11に示すような、ゆっくりした光量変化である。これは、氏の観測地点が掩蔽帯の端にあたり、ほぼ接食の状況にあり、コンタクトアングルがきわめて大きかったためであると考えられる。ここでは、Limovieの回折シミュレーションとのフィッティングを用いて、コンタクトアングルを含めた小惑星の縁の地形について推定することについても試みる。
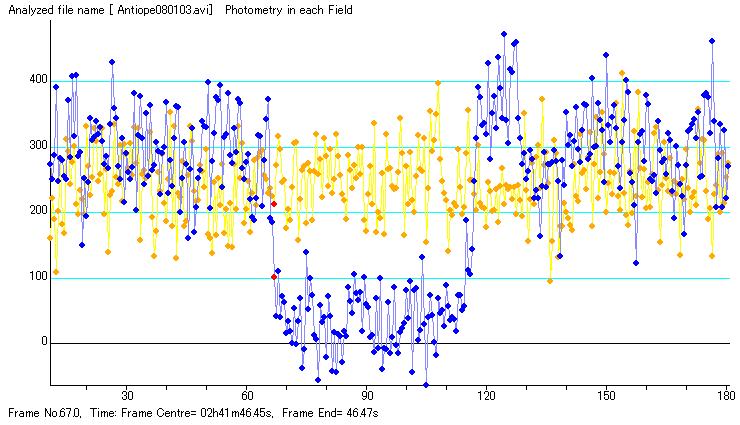
図11 北崎氏観測のビデオの光量変化
接食に近く、ゆっくりした増減光が記録されている。
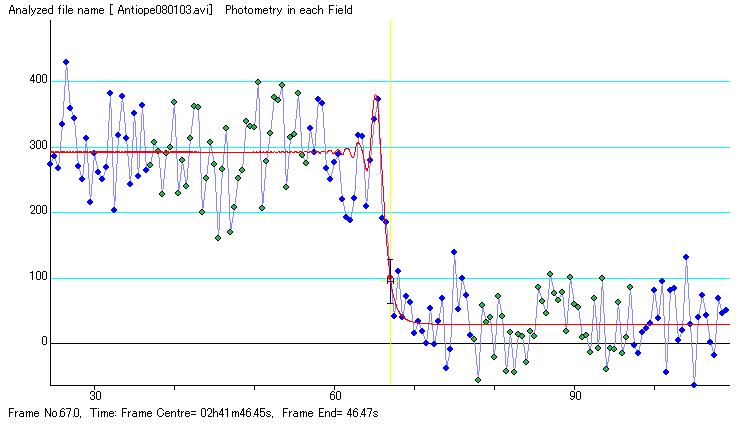
図12 潜入の光量変化
図に記載がないが、No.66フレームの露出終了時刻は、17h
41m 46.44sである。これよりNo.67.0フィールドの露出中央時刻は、
17h 41m 46.45s
である。フィッティングの結果から、 オフセット値+2ミリ秒、誤差14ミリ秒、コンタクトアングル69.2度を得た。これより現象時刻として、
17h 41m 46.45s +/- 0.02s
を得た。 (誤差を切り上げて大きく見積もった。)
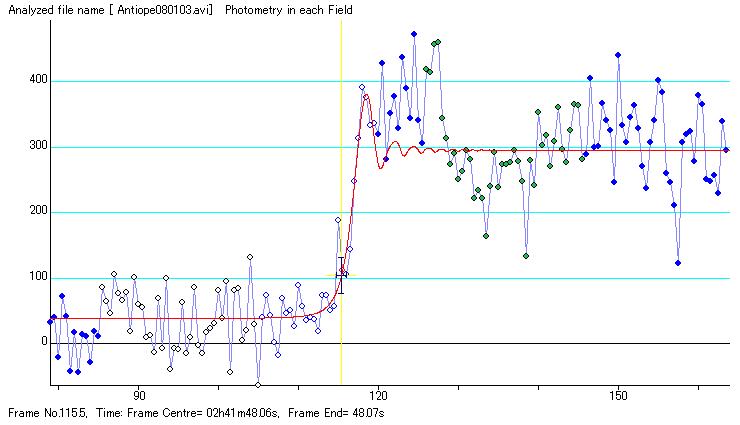
図13 出現の光量変化
フィッティングの結果から、 オフセット値-5ミリ秒、誤差19ミリ秒、コンタクトアングル77.5度を得た。これよりNo.115.5フィールドの露出中央時刻は、
17h 41m 48.065s である。
以上から、現象時刻として、
17h 41m 48.06s +/- 0.02s
を得た。
なお、上記の結果は、フィットさせるデータを限定した(白抜きの○印)場合についてのものである。Limovieのフィッティング機能をそのまま用いると、下図のような結果となる。
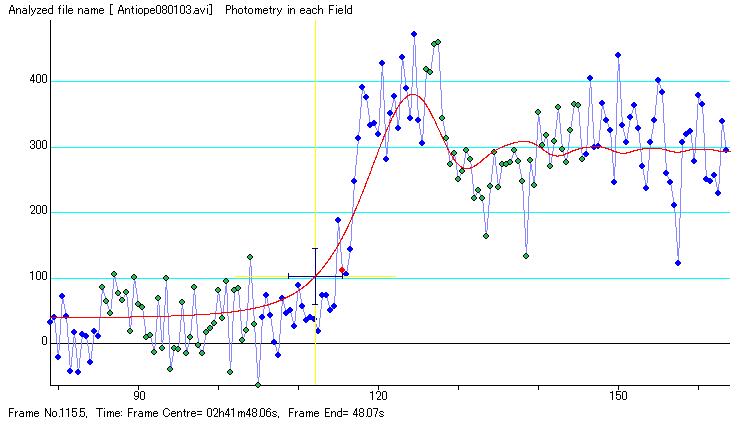
図14 ゆるやかな増光へのフィッティング
現象時刻
-114ミリ秒、 誤差114ミリ秒、 コンタクトアングル 86.8度である。
これは、小惑星の縁の地形を反映しているためと考えられる。表面にある岩石等で起伏が大きければ、局所的には図13のように増光するが、再び光の一部が凸部に隠されるなどして、複雑な変化が起こるものと考えられる。
5.浦辺守氏の観測
(1)
時刻の測定
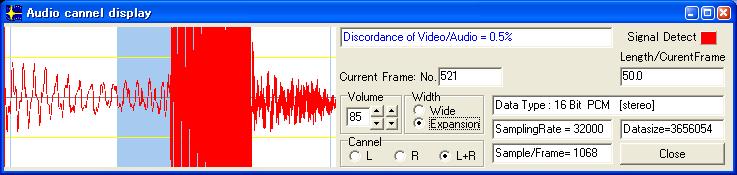
この電話時報の音声信号は、1フィールドより長い。したがって、音声信号がちょうどフレームの半分になったところが、フレーム中央時刻と正秒が一致したフレームである。そのためにはLength/CurrentFrame=50% となっているフレームを探せばよく、No.521フレームがそれにあたる。このフレームの中央時刻は、17h
41m 43.000s である。
ただ、ビデオテープに記録された音声信号が何らかの原因で劣化しており、画像と音声がキャプチャの時点で確実に同期できていない可能性がある。これは、最後に述べる解析者間の解析値の違いとなって現れているのかもしれない。
(2)
瞬間的な光量変化とフィッティング
このビデオの中で、星像は瞬時に消失および出現している。整約図上でも、ほぼ小惑星の中央部での潜入、出現であり、コンタクトアングルはゼロに近かったと考えられる。このように瞬間的な現象の場合のフィッティングと時刻の求め方について考察する。
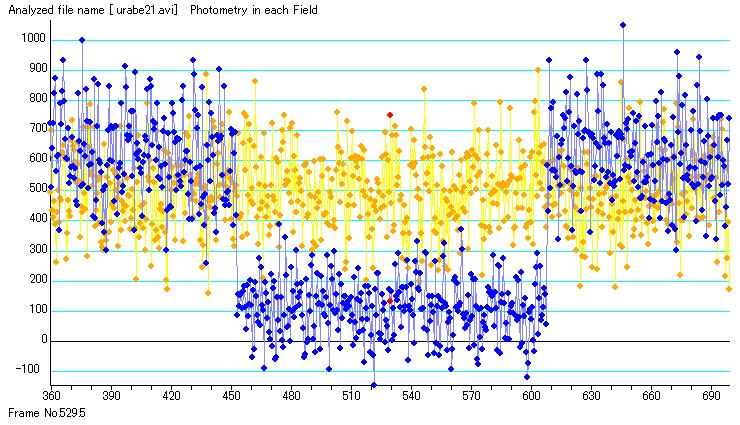
図15 浦辺氏観測のビデオにおける光量変化
Limovieのfor
Grazing
機能でフィッティングを行うと、図16のように、コンタクトアングル59.5度が得られた。表面の凹凸によりと考えるとありえない数値ではないが、やはり大きい数値である。ここで、for
Occultationモードでコンタクトアングルを0度に設定して比較すると、図17のようになる。たしかに、図16の方が一致がよいが、それはシンチレーションの振幅に潜入前の振幅を合わせていることが原因である。このように中間値を持つフレームまたはフィールドが少ないかまたはない場合、for
Grazing モードを適用してコンタクトアングルを求めるのは適切でない。
出現については、図18、図19にフィッティングの結果を示す。この場合、時刻測定の整約の結果からは掩蔽帯の中央であり、コンタクトアングルは小さい値であった可能性が大きい。図18の現象中央時刻の二つ後のフィールドの値が低下しているのは、グラフの形状から復光後のシンチレーションの影響であると考えられる。やはり、光量変化よりコンタクトアングルを得るには適切でない。
これに対して、現象時刻を求める場合は、小惑星の地形が滑らかであるという保証はなく、ゆっくりに見える光量変化がノイズによるものかどうかもはっきりしない。図18で、赤く示されたNo.607.5フレームより8フィールドにわたって値が「規則正しく」上下しているように見えることから、この間、ゆっくりした変化が起こっていた可能性もある。したがって、特定のコンタクトアングルを仮定してフィッティングをおこなった結果から時刻を得ることは適切でないと考える。フィッティングが大きく外れない限り、for
Grazingモードを用いた方が、より多くのフィールド(フレーム)に対してフィットさせることができ、統計的により確からしい「現象中央」の時刻を得ることができると考えられる。また、for
Grazingモードの方が想定誤差も大きくなることから、より「安全」な値と誤差範囲の見積もりができると考える。
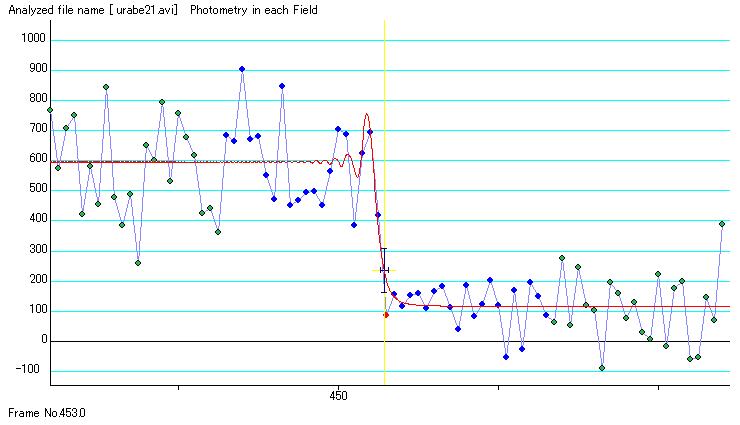
図16 潜入の光量変化 (for
Grazing モード)
オフセット -5ミリ秒、 誤差+/-9ミリ秒、 コンタクトアングル
50.4度
現象時刻は、tc
= 17h 41m 43.000s + (453-521)/29.97 - 0.008 - 0.005 = 17h 41m 40.719s
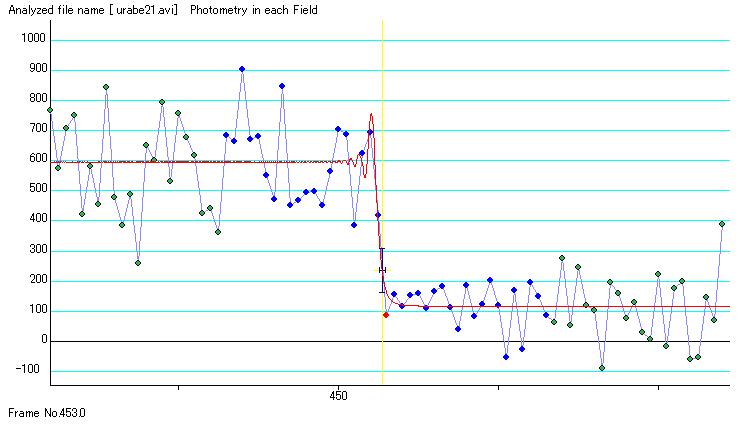
図17 潜入の光量変化とシミュレーションとのフィッティング (for
Occultation mode)
オフセット -9ミリ秒、 誤差+/-6ミリ秒、 コンタクトアングル
0度(for
Occultation)
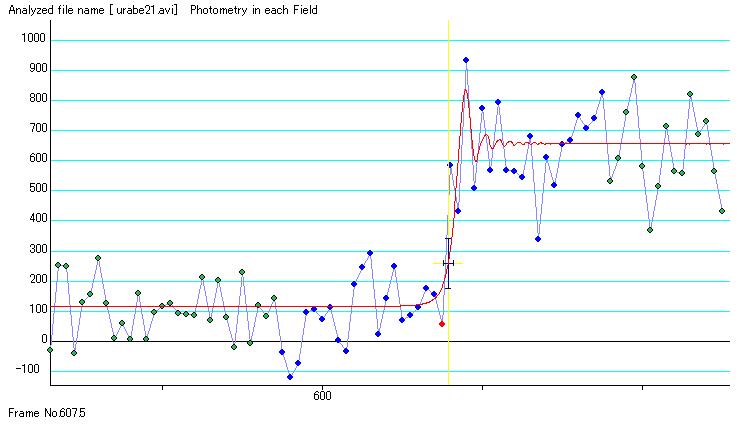
図18 出現の光量変化
オフセット +11ミリ秒、 誤差+/-10ミリ秒、 コンタクトアングル52,6度
現象時刻は、tc
= 17h 41m 43.000s + (607-521)/29.97 + 0,008 + 0.011 = 17h 41m 45.889s
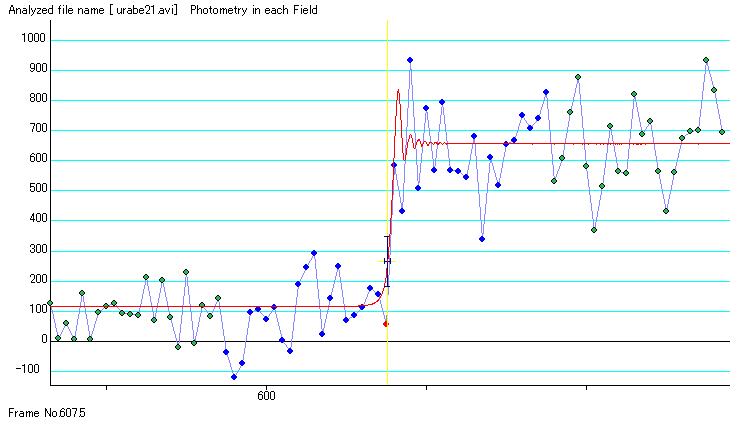
図19 出現の光量変化 (for
Occultation モード コンタクトアングル=0度を仮定)
オフセット +2ミリ秒、 誤差+/-6ミリ秒、 コンタクトアングル0度
|
現 象
|
早水氏の解析値
|
解析値
|
|
潜 入
|
17h
41m 40.700s +/- 0.04s
|
17h
41m 40.719s +/- 0.017s
|
|
出 現
|
17h
41m 45.867s +/- 0.04s
|
17h
41m 45.889s +/- 0.017s
|
表2 得られた現象時刻
ここで、筆者のつけている誤差は、測定単位であるフィールドの幅である。ビデオからの時刻測定、という意味でこのようにつけている。なお、早水氏のつけている誤差は、観測値の経緯度等の誤差も含めた星食観測のトータルとしての誤差である。時刻の解析値の間に0.02秒程度の誤差があるが。これは時刻の基準点に関する違いまたは、音声時刻信号の不調等に起因していると思われる。
6.内山茂男氏の観測
内山氏は口径250mm焦点距離2500mmという超焦点の望遠鏡で観測されているが、コリメート法を用いることにより、図20のような広い視野の観測をおこなっている。眼視で対象星を探した後、自作のアダプターによりすぐにカメラをセットすることができるとのことで、自動導入によらないときにはたいへん有効な手法である。
この観測の弦の位置は大川氏の観測に近く、録画の状況もよく似ている。対象星が暗いことから、S/N比が低い画像であるが、Limovieによる測光結果は比較的明瞭である。減光・増光ともに、中間の値を示すフレームがなく、瞬間的な現象である。以下では、このビデオから現象時刻を精度よく求めることを試みる。
図19 内山氏の観測ビデオのスナップショット
天頂プリズムを使用していることから、「裏像」である。
(1)インサータTIViの表示時刻の取得
図19のように、保時にビデオインサータTIViが用いられている。この表示はGPSレシーバより得られる高精度の時刻を表している。
Limovieの最新のテストバージョン(0.9.28b)
では、ファイル名やフレーム番号、シミュレーションより求められた時刻についてもグラフに表示できるようになっている。更に、画面から読み取ったタイムインサータの時刻も表示することができる。この機能があれば、測定のたびに表示画面を確認する必要がなく、計算にも便利である。インサータKIWI-OSDについては、表示位置が固定されていることから特別な操作をしなくても、Limovieが自動的に時刻を読み取るようになっている。一方、TIViは、表示する数字の大きさ(幅)を半固定抵抗により変更できる機能がある。観測時には便利な機能であるが、Limovieの時刻読み取り機能としては、読み取りに困難な点が加わることになる。LimovieはVer.0.9.27以降、KIWI-OSDの時刻読み取りに開発した、より正確で効率のよいアルゴリズムを用いてTIViの時刻を読み取っている。これにより、従来2桁だった読み取りが、秒表示までの8桁を読み取ることができるようになっているが、そのためには操作に多少の工夫が必要である。ここでは、正確にTIViの表示時刻を取得する方法について述べる。
TIViの時刻読み取りの方法
1.
KIWI-OSD にチェックをつける
2.
Position Set ラジオボタンを、TIViにする。
3.
時刻表示の「時」の左上隅(より、1〜2ピクセル下)付近をクリックする。
以上で時刻を読み取ることができる。しかし、時刻表示の明るさやコントラストにより、認識用の青い枠(フレーム)が正確に数字を囲むことができずに、誤った数字として認識する場合もある。そのような場合には、画面右の(KIWIチェックボックスのの左横にある)Threshold(敷居)値を様々に変えてみるとよい。最適なThreshold値は、画像の条件により異なる。
動作の大まかな特徴として、Threshold値が最適な値から大きく外れているときは、青い枠が現れないか、または、数字の半分しか囲むことができないなどの状況となる。また、数字が青い枠に囲まれても、微妙な数値の間違い(8と6、7と1など)が生じる。そこで、青い枠で囲まれたときは、次の操作をおこなって、正しい数値を認識するように調整する。
4.
Field Show ボタンを押し、画面を上下に分離(スプリット)する。
このときに現れる時刻表示と、End
Time of Exposure ボックス内に表示される時刻が異なっているか見る。
5.
もし異なっていれば、Threshold値を変更してから、ビデオ画像上の「時」表示の左上隅をクリックする。
6.
ここで正常に表示されても、別の数字が認識されないこともありうる。1frame+ボタンをクリックしてコマ送りを10回程度繰り返し、秒および秒の小数点以下の数字が正しく認識されているかを確認する。
7.
以上が正しく表示されたら、Position
Setラジオボタンを Star
に変える。
通常は、以上でTIViの時刻表示を正しく読み取ることができる。
(2)時刻の解析
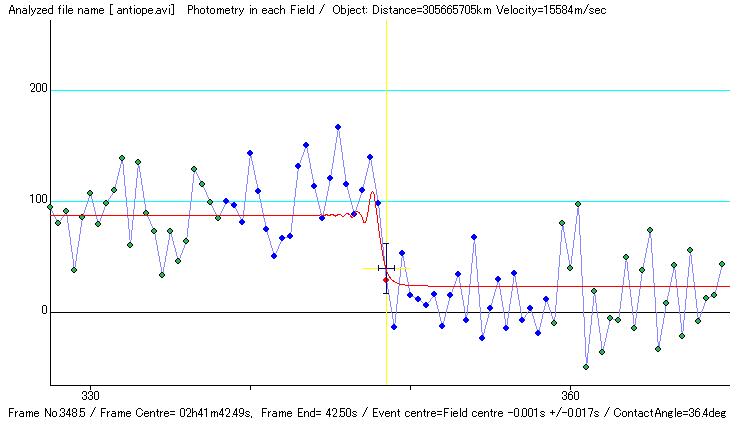
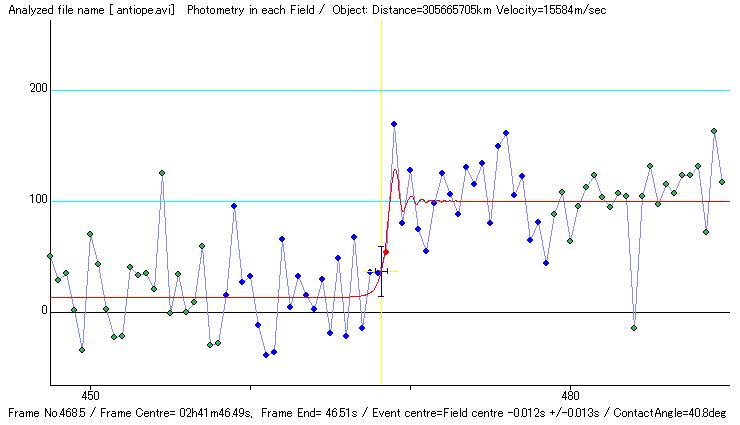
図20 内山氏の観測のライトカーブ (上:潜入、 下出現)
これより現象時刻として、 潜入:17h41m42.50s+/-0.02s
出現:17h41m46.49s
+/-0.02s を得た。
内山氏はビデオ画面(フレーム)の観察から時刻測定を行い、現象時刻を
減光開始
02h 41m 42.50s (±1fr)JST,減光終了
02h 41m 46.51s (±1fr)JST
と報告している。Limovieを用いた解析から、氏の時刻観測が精度よくなされていることを確認することができた。
III コンタクトアングルの推定値について
ここでは、時刻観測より得られたコンタクトアングルと、回折シミュレーションによる推定値の比較を行う。
|
|
潜 入
|
出 現
|
|
観測者
|
整約図より
|
回折シミュレーション
|
整約図より
|
回折シミュレーション
|
|
北崎勝彦
|
63
|
69.2
|
75
|
77.5
|
|
下川,横山,柳澤
|
48
|
61.0
|
51
|
62.1
|
|
大川拓也
|
36
|
41.4
|
37
|
42.0
|
|
内山茂男
|
32
|
36.4
|
33
|
40.8
|
|
浦辺 守
|
2
|
50.4
|
5
|
52.6
|
表2において、黄色く示したものは、減光増光の際に、明らかにノイズの振幅の範囲から外れた「中間値」を持つ現象である。
今回の(90)AntiopeによるTYC1895-01450-1の掩蔽の現象は、小惑星の動きが速く、各地でとらえられた増減光も瞬間的なもの
(1フィールド以下)が多かった。そのような場合は、コンタクトアングルがフィールドの長さに依存した値として得られることになると考えられる。具体的にどの程度の中間値のフレーム数が必要か、また、コンタクトアングルの誤差について数値として明確に表現できないか、について、検討が必要である。そのために、複数の観測地の時刻観測より得られた小惑星の形状について上記のような比較をおこない、更に検証していく予定である。
謝辞
貴重な観測をお送りいただいた観測者の皆様を以下に記します。
観測者(敬称略)
北崎勝彦、下川有希、横山洋平、柳澤正久、大川拓也、内山茂男、浦辺 守
また、現象の整約とビデオの集約をされた早水勉氏(せんだい宇宙館)から、編集されたビデオをお送りいただきました。
以上の皆様に心より感謝申し上げます。