重星SAO98768 の解析 - Linked Tracking による測光精度の改善 -
宮下和久
初稿 2007.11.03
1.はじめに
石田正行氏から、重星SAO98768の暗縁出現を撮影したビデオをお送りいただいた。輝面にたいへん近い現象であることと、暗部は地球照で明るくなっている。そこで、正確な測定を行うためにLimovieの設定について最適化を図り、主星・伴星の等級と現象時刻を得た。
図1 観測ビデオより静止画キャプチャした画像
2.Linked Tracking (関連追尾)
風などで画面が揺れるときや、極軸の設定が充分でないときは、画面内を星像が移動する。Limovieは星像追尾機能を持っており、一定の条件下で星像を測定用apertureの中心に置くように動作する。このときの動作には、AnchorモードとDriftモードの二つがあり、前者は最初に設定された画面上の位置を中心に、Tracking Radiusで設定した半径を最大値として星像を探し、測光領域を重ねる。星像が大きく移動する場合には、測光領域から外れてしまうこともあるが、掩蔽により星像が消失したときにも測光領域の位置が大きく変わることがないことから安定している。一方、Driftモードは、星像を追って画面内を自由に移動することができる。小惑星による恒星食のときにしばしば見られるような星像が完全に消失しない場合には、きわめて有効にはたらく。しかし、星像が完全に消失したときは、地球照で光る月縁やバックグラウンドの光点などを追って測光領域が移動してしまう。Linked Trackingは、対象星を含む2つの恒星を同時に測定することにより、2つのモードの長所を生かそうとした機能である。現象時刻付近において、比較星は消失することなく輝き続けることから、Driftモードで追尾することができる。対象星はAnchorモードとし、その中心(投下された碇をイメージしてください)位置が、比較星の動きと連結されていることから、対象星に対する測光領域の位置あわせは、シンチレーション等に起因する比較星と対象星の相対位置のずれを補正するのみでよい。
具体的には、次のように操作する。なお、以下の機能は、画面内に2つの恒星が写り込んでいることが条件となる。
1. 対象星用測光領域の設定
(1) 対象星にカーソルを合わせ、左クリックして、測光領域Object1(青色)を対象星に合わせる。
(2) Tracking Threshold を設定する。
バックグラウンドが充分暗いときは、50でもよいが、たいていはバックグラウンドが明るく、調節が必要である。
バックグラウンドが明るい場合、大き目のApertureだと、星像クリック直後には充分に中心が合っていない。Tracking Thresholdを50からだんだんに上げていくと、測光領域が中心に合うように動くところがある。多くの場合、80程度であり、その値に設定すればよい。
(3) Star Profile 3D ボタンをクリックし、星像を確認する。測光用Aperture(赤色)がちょうど星像を取り囲むような大きさに半径を設定する。
*ノイズが大きい場合には、Noise reduction の半径を移動平均の3に設定すると見やすくなる。この場合、星像の裾が1ピクセル外れていても問題ない。
(4) Tracking mode をAnchorモードにする。
(5) Star Tracking Radius を、小さい値に設定する。拡大率やシンチレーションにもよるが、2〜3に設定するとよい。
2.比較星用測光領域の設定
(1) 比較星にカーソルを合わせ、右クリックする。ポップアップメニューから Object Star Add を左クリックする。
Object2(黄色の測光領域)が現れる。
多くの場合、充分に中心が合わないことから、再度星像を左クリックして、正確に合わせる。
(2) Tracking Thresholdを設定する。方法は、対象星と同様。
(3) Apertureの半径は、対象星と同じでよい。
(4) Tracking modeをDriftモードにする。
3.カレントオブジェクトの変更
画像を右クリックし、ポップアップメニューのObject 1(青)を左クリックして、青色の測光領域がハイライトされるようにする。
これは、基準となるObject 2(黄色)の位置が不用意に画面をクリックすることで変わってしまわないようにするためである。
4. Linked Tracking の動作を有効にする。
Linked Tracking の Obj2=>1 にチェックを入れる。
5. 測光をおこなう。
* フレーム表示用のスライドバーや+/-10secボタンなどでフレームの進みを大きくすると、測光領域の位置が星像から外れてしまうことがある。これは、1フレームずつ追尾を行いながら基準位置を変えていくDriftモードの特徴である。画面の送りや戻しをするときは、+/-1secボタンを活用するとよい。
視野内に別の恒星が写っていないときは、月縁に輝点があればそれをObject 2として利用する。ただし、この場合は、月と恒星は相対位置を変えていることから、ビデオファイル上の2つのフレームにおいて位置あわせをおこなう。Liked Trackingの2つのSetボタンをそれぞれビデオの時間的に早いフレームと遅いフレームで押しておくと、Limovieの測光部は月の輝部の位置から計算して、恒星の動きを一定に保つように移動する。 これにより、恒星を利用したLinked Trackingとほぼ同様の効果を得ることができる。
3.Linked Trackingの効果
図 は、Linked Trackingを用いて測定したグラフである。 図 のLinked Trackingを使用しなかった場合の結果と比べて、最も大きな相違点は、星像出現前の値である。Linked Tracking を用いた場合がほぼ0であるのに対し、用いなかったときは150という高い値を示す。これは、Apertureが地球照で明るくなった月縁を検知して、星像の場合と同様に明るい部分を中心に置くように移動したため、地球照の明るさが測定されているためである。それに対してLinked Trackingの場合は、Object 2 の測光領域は、Object 1にリンクしており、Tracking Radiusを小さく設定した場合には、月縁に大きく入り込むことはない。星食観測からコンポーネントの等級を得る際に、星像消失時の値は精度に大きく影響する。地球照で月の暗部がはっきりと認められるときには、可能な限りLinked Trackingを用いた方がよい。
また、図 に、月の輝点を基準にしたLinked Trackingの結果を示す。この場合も、恒星によるLinked Trackingを用いた場合と同様に星像の消失時の値に大きな改善がみられる。
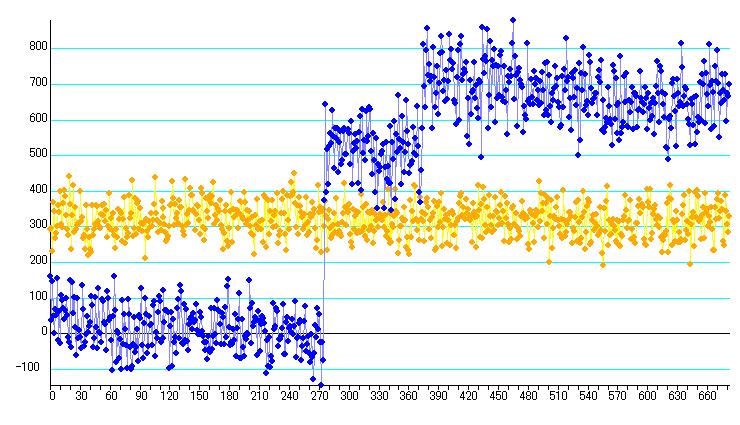
図 同一視野に写っている恒星を基準としたLinked
Trackingによる測定結果
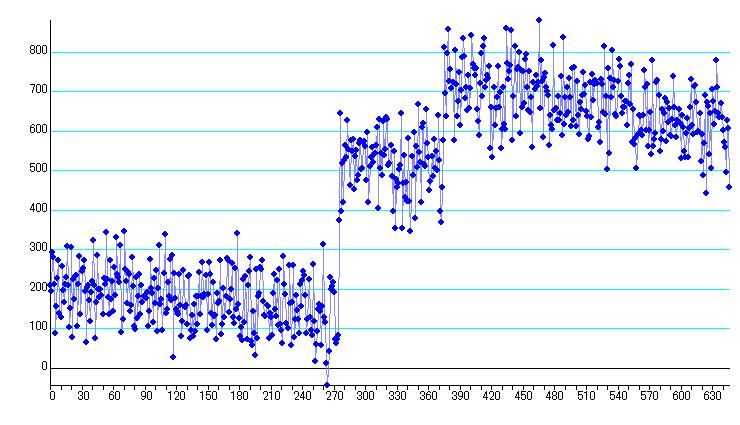
図 Linked
Trackingを用いない場合の測定結果
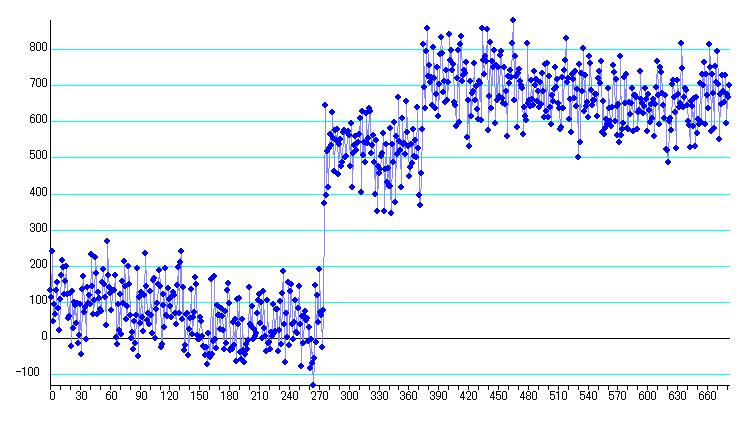
図 月縁の輝点を利用したLinked
Trakingによる測定結果
4.コンポーネントの等級
月の輝部が大きいとき、その光で視野全体が明るくなることが多い。このような場合、輝部に近いほどバックグラウンドも明るくなることが多いが、これは薄雲やもやの散乱光の影響と思われる。SAO98684の掩蔽は、月のカスプに近い位置で起きた暗縁出現である。そのため、出現後に月が遠ざかるにつれて、全体の光量測定値が漸減していく。その時間に対する割合がほぼ一定であることが、グラフからも読みとることができる。この月の輝部の影響を除去するために、
図 等級の測定
|
|
開始フレーム |
終了フレーム |
フレーム数 |
光量平均 |
標準偏差 |
|
潜入中 |
No.181 |
No.271 |
91 |
-1.2 |
53.2 |
|
主 星 |
No.278 |
No.368 |
91 |
516.0 |
69.0 |
|
主星 + 伴星 |
No.380 |
No.470 |
91 |
710.7 |
79.0 |

ワシントン重星カタログでは
09376+1528A 2479 1912 1995 15 258 206 0.3 0.2 9.23 9.87 F8
XZ Double Star File に基づく、Occultの重星の表示は
98678 is double : 8.6 9.2 0.26" 236.9
である。
石田氏による観測から得られた値では、主星と伴星がほぼ1等級異なる。