
ڈdگ¯SAO98768 ‚ج‰ًگحپ@- Linked Tracking ‚ة‚و‚é‘ھŒُگ¸“x‚ج‰ü‘P -
‹{‰؛کa‹v
ڈ‰چeپ@2007.11.03
‰ü’ùپ@2007.11.04
‚PپD‚ح‚¶‚ك‚ة
گخ“cگ³چsژپ‚©‚çپAڈdگ¯SAO98768‚جˆأ‰ڈڈoŒ»‚ًژB‰e‚µ‚½ƒrƒfƒI‚ً‚¨‘—‚è‚¢‚½‚¾‚¢‚½پB‹P–ت‚ة‚½‚¢‚ض‚ٌ‹ك‚¢Œ»ڈغ‚إ‚ ‚邱‚ئ‚ئپAˆأ•”‚ح’n‹…ڈئ‚إ–¾‚é‚‚ب‚ء‚ؤ‚¢‚éپB‚»‚±‚إپAگ³ٹm‚ب‘ھ’è‚ًچs‚¤‚½‚ك‚ةLimovie‚جگف’è‚ة‚آ‚¢‚ؤچإ“K‰»‚ًگ}‚èپAژهگ¯پE”؛گ¯‚ج“™‹‰‚ئŒ»ڈغژچڈ‚ً“¾‚½پB
‚ـ‚½پALimovie‚ة‚آ‚¢‚ؤپALinked Tracking ‚جˆµ‚¢•û‚âپA“™‹‰‚ً‹پ‚ك‚邽‚ك‚جŒُ—ت‚ج•½‹د’l‚ج•\ژ¦‚ب‚اپA‰ًگح‚ةٹˆ—p‚إ‚«‚éگV‹@”\‚ئٹˆ—p–@‚à‚ ‚ي‚¹‚ؤڈذ‰î‚·‚éپB
‚ب‚¨پA–{چe‚ة—p‚¢‚½ ƒeƒXƒgƒoپ[ƒWƒ‡ƒ“‚ج Limovie Ver.0.9.27b‚حپAˆب‰؛‚و‚èƒ_ƒEƒ“ƒچپ[ƒh‚إ‚«‚éپB
گ}‚Pپ@ٹد‘ھƒrƒfƒI‚و‚èگأژ~‰وƒLƒƒƒvƒ`ƒƒ‚µ‚½‰و‘œ
‚QپDLinked Tracking (ٹضکA’ا”ِ)
‚±‚ج‹@”\‚حپAIOTA‚جTom Campbellژپ‚ة‚و‚è’ٌˆؤ‚³‚ꂽ‚à‚ج‚إ‚ ‚éپB‹@”\–¼‚ئپA‘ٹ‘خˆت’u‰آ•د‚ج‹@”\‚ة‚آ‚¢‚ؤ‚حپAHenk J.J.Bulder ژپ‚ج’ٌˆؤ‚ة‚و‚éپB
•—‚ب‚ا‚إ‰و–ت‚ھ—h‚ê‚é‚ئ‚«‚âپA‹ةژ²‚جگف’è‚ھڈ[•ھ‚إ‚ب‚¢‚ئ‚«‚حپA‰و–ت“à‚ًگ¯‘œ‚ھˆع“®‚·‚éپBLimovie‚حگ¯‘œ’ا”ِ‹@”\‚ًژ‚ء‚ؤ‚¨‚èپAˆê’è‚جڈًŒڈ‰؛‚إگ¯‘œ‚ً‘ھ’è—paperture‚ج’†گS‚ة’u‚‚و‚¤‚ة“®چى‚·‚éپB‚±‚ج‚ئ‚«‚ج“®چى‚ة‚حپAAnchorƒ‚پ[ƒh‚ئDriftƒ‚پ[ƒh‚ج“ٌ‚آ‚ھ‚ ‚èپA‘Oژز‚حچإڈ‰‚ةگف’肳‚ꂽ‰و–تڈم‚جˆت’u‚ً’†گS‚ةپATracking Radius‚إگف’肵‚½”¼Œa‚ًچإ‘ه’l‚ئ‚µ‚ؤگ¯‘œ‚ً’T‚µپA‘ھŒُ—جˆو‚ًڈd‚ث‚éپBگ¯‘œ‚ھ‘ه‚«‚ˆع“®‚·‚éڈêچ‡‚ة‚حپA‘ھŒُ—جˆو‚©‚çٹO‚ê‚ؤ‚µ‚ـ‚¤‚±‚ئ‚à‚ ‚é‚ھپA‰†•ء‚ة‚و‚èگ¯‘œ‚ھڈءژ¸‚µ‚½‚ئ‚«‚ة‚à‘ھŒُ—جˆو‚جˆت’u‚ھ‘ه‚«‚•د‚ي‚邱‚ئ‚ھ‚ب‚¢‚±‚ئ‚©‚çˆہ’肵‚ؤ‚¢‚éپBˆê•ûپADriftƒ‚پ[ƒh‚حپAگ¯‘œ‚ً’ا‚ء‚ؤ‰و–ت“à‚ًژ©—R‚ةˆع“®‚·‚邱‚ئ‚ھ‚إ‚«‚éپBڈ¬کfگ¯‚ة‚و‚éچPگ¯گH‚ج‚ئ‚«‚ة‚µ‚خ‚µ‚خŒ©‚ç‚ê‚é‚و‚¤‚بگ¯‘œ‚ھٹ®‘S‚ةڈءژ¸‚µ‚ب‚¢ڈêچ‡‚ة‚حپA‚«‚ي‚ك‚ؤ—LŒّ‚ة‚ح‚½‚ç‚پB‚µ‚©‚µپAگ¯‘œ‚ھٹ®‘S‚ةڈءژ¸‚µ‚½‚ئ‚«‚حپA’n‹…ڈئ‚إŒُ‚éŒژ‰ڈ‚âƒoƒbƒNƒOƒ‰ƒEƒ“ƒh‚جŒُ“_‚ب‚ا‚ً’ا‚ء‚ؤ‘ھŒُ—جˆو‚ھˆع“®‚µ‚ؤ‚µ‚ـ‚¤پBLinked Tracking‚حپA‘خڈغگ¯‚ًٹـ‚ق2‚آ‚جچPگ¯‚ً“¯ژ‚ة‘ھ’è‚·‚邱‚ئ‚ة‚و‚èپA2‚آ‚جƒ‚پ[ƒh‚ج’·ڈٹ‚ًگ¶‚©‚»‚¤‚ئ‚µ‚½‹@”\‚إ‚ ‚éپBŒ»ڈغژچڈ•t‹ك‚ة‚¨‚¢‚ؤپA”نٹrگ¯‚حڈءژ¸‚·‚邱‚ئ‚ب‚‹P‚«‘±‚¯‚邱‚ئ‚©‚çپADriftƒ‚پ[ƒh‚إ’ا”ِ‚·‚邱‚ئ‚ھ‚إ‚«‚éپB‘خڈغگ¯‚حAnchorƒ‚پ[ƒh‚ئ‚µپA‚»‚ج’†گSپi“ٹ‰؛‚³‚ꂽ’ô‚ًƒCƒپپ[ƒW‚µ‚ؤ‚‚¾‚³‚¢پjˆت’u‚ھپA”نٹrگ¯‚ج“®‚«‚ئکAŒ‹‚³‚ê‚ؤ‚¢‚邱‚ئ‚©‚çپA‘خڈغگ¯‚ة‘خ‚·‚é‘ھŒُ—جˆو‚جˆت’u‚ ‚ي‚¹‚حپAƒVƒ“ƒ`ƒŒپ[ƒVƒ‡ƒ““™‚ة‹Nˆِ‚·‚é”نٹrگ¯‚ئ‘خڈغگ¯‚ج‘ٹ‘خˆت’u‚ج‚¸‚ê‚ً•âگ³‚·‚é‚ج‚ف‚إ‚و‚¢پB
گ}‚Qپ@Linked Tracking‚ج‚µ‚‚ف
‹ï‘ج“I‚ة‚حپAژں‚ج‚و‚¤‚ة‘€چى‚·‚éپB‚ب‚¨پAˆب‰؛‚ج‹@”\‚حپA‰و–ت“à‚ة‚Q‚آ‚جچPگ¯‚ھژت‚èچ‚ٌ‚إ‚¢‚邱‚ئ‚ھڈًŒڈ‚ئ‚ب‚éپB
1. ‘خڈغگ¯—p‘ھŒُ—جˆو‚جگف’è
(1) ‘خڈغگ¯‚ةƒJپ[ƒ\ƒ‹‚ًچ‡‚ي‚¹پAچ¶ƒNƒٹƒbƒN‚µ‚ؤپA‘ھŒُ—جˆوObject‚PپiگآگFپj‚ً‘خڈغگ¯‚ةچ‡‚ي‚¹‚éپB
(2) Tracking Threshold ‚ًگف’è‚·‚éپB
ƒoƒbƒNƒOƒ‰ƒEƒ“ƒh‚ھڈ[•ھˆأ‚¢‚ئ‚«‚حپA50‚إ‚à‚و‚¢‚ھپA‚½‚¢‚ؤ‚¢‚حƒoƒbƒNƒOƒ‰ƒEƒ“ƒh‚ھ–¾‚é‚پA’²گك‚ھ•K—v‚إ‚ ‚éپB
ƒoƒbƒNƒOƒ‰ƒEƒ“ƒh‚ھ–¾‚é‚¢ڈêچ‡پA‘ه‚«–ع‚جAperture‚¾‚ئپAگ¯‘œƒNƒٹƒbƒN’¼Œم‚ة‚حڈ[•ھ‚ة’†گS‚ھچ‡‚ء‚ؤ‚¢‚ب‚¢پBTracking Threshold‚ً50‚©‚炾‚ٌ‚¾‚ٌ‚ةڈم‚°‚ؤ‚¢‚‚ئپA‘ھŒُ—جˆو‚ھ’†گS‚ةچ‡‚¤‚و‚¤‚ة“®‚‚ئ‚±‚ë‚ھ‚ ‚éپB‘½‚‚جڈêچ‡پA80’ِ“x‚إ‚ ‚èپA‚»‚ج’l‚ةگف’è‚·‚ê‚خ‚و‚¢پB
(3) Star Profile 3D ƒ{ƒ^ƒ“‚ًƒNƒٹƒbƒN‚µپAگ¯‘œ‚ًٹm”F‚·‚éپB‘ھŒُ—pAperture(گشگF)‚ھ‚؟‚ه‚¤‚اگ¯‘œ‚ًژو‚èˆح‚ق‚و‚¤‚ب‘ه‚«‚³‚ة”¼Œa‚ًگف’è‚·‚éپB
پ@*ƒmƒCƒY‚ھ‘ه‚«‚¢ڈêچ‡‚ة‚حپANoise reduction ‚ج”¼Œa‚ًˆع“®•½‹د‚ج‚R‚ةگف’è‚·‚é‚ئŒ©‚â‚·‚‚ب‚éپB‚±‚جڈêچ‡پAگ¯‘œ‚جگ‚ھ1ƒsƒNƒZƒ‹ٹO‚ê‚ؤ‚¢‚ؤ‚à–â‘è‚ب‚¢پB
(4) Tracking mode ‚ًAnchorƒ‚پ[ƒh‚ة‚·‚éپB
(5) Star Tracking Radius ‚ًپAڈ¬‚³‚¢’l‚ةگف’è‚·‚éپBٹg‘ه—¦‚âƒVƒ“ƒ`ƒŒپ[ƒVƒ‡ƒ“‚ة‚à‚و‚é‚ھپA‚Qپ`‚R‚ةگف’è‚·‚é‚ئ‚و‚¢پB
2.”نٹrگ¯—p‘ھŒُ—جˆو‚جگف’è
(1) ”نٹrگ¯‚ةƒJپ[ƒ\ƒ‹‚ًچ‡‚ي‚¹پA‰EƒNƒٹƒbƒN‚·‚éپBƒ|ƒbƒvƒAƒbƒvƒپƒjƒ…پ[‚©‚ç Object Star Add ‚ًچ¶ƒNƒٹƒbƒN‚·‚éپB
Object‚Qپi‰©گF‚ج‘ھŒُ—جˆوپj‚ھŒ»‚ê‚éپB
‘½‚‚جڈêچ‡پAڈ[•ھ‚ة’†گS‚ھچ‡‚ي‚ب‚¢‚±‚ئ‚©‚çپAچؤ“xگ¯‘œ‚ًچ¶ƒNƒٹƒbƒN‚µ‚ؤپAگ³ٹm‚ةچ‡‚ي‚¹‚éپB
(2) Tracking Threshold‚ًگف’è‚·‚éپB•û–@‚حپA‘خڈغگ¯‚ئ“¯—lپB
(3) Aperture‚ج”¼Œa‚حپA‘خڈغگ¯‚ئ“¯‚¶‚إ‚و‚¢پB
(4) Tracking mode‚ًDriftƒ‚پ[ƒh‚ة‚·‚éپB
3.ƒJƒŒƒ“ƒgƒIƒuƒWƒFƒNƒg‚ج•دچX
‰و‘œ‚ً‰EƒNƒٹƒbƒN‚µپAƒ|ƒbƒvƒAƒbƒvƒپƒjƒ…پ[‚جObject 1(گآ)‚ًچ¶ƒNƒٹƒbƒN‚µ‚ؤپAگآگF‚ج‘ھŒُ—جˆو‚ھƒnƒCƒ‰ƒCƒg‚³‚ê‚é‚و‚¤‚ة‚·‚éپB
‚±‚ê‚حپAٹîڈ€‚ئ‚ب‚éObject 2(‰©گF)‚جˆت’u‚ھ•s—pˆس‚ة‰و–ت‚ًƒNƒٹƒbƒN‚·‚邱‚ئ‚إ•د‚ي‚ء‚ؤ‚µ‚ـ‚ي‚ب‚¢‚و‚¤‚ة‚·‚邽‚ك‚إ‚ ‚éپB
4. Linked Tracking ‚ج“®چى‚ً—LŒّ‚ة‚·‚éپB
Linked Tracking ‚ج Obj2=>1 ‚ةƒ`ƒFƒbƒN‚ً“ü‚ê‚éپB
5. ‘ھŒُ‚ً‚¨‚±‚ب‚¤پB
* ƒtƒŒپ[ƒ€•\ژ¦—p‚جƒXƒ‰ƒCƒhƒoپ[‚â+/-10secƒ{ƒ^ƒ“‚ب‚ا‚إƒtƒŒپ[ƒ€‚جگi‚ف‚ً‘ه‚«‚‚·‚é‚ئپA‘ھŒُ—جˆو‚جˆت’u‚ھگ¯‘œ‚©‚çٹO‚ê‚ؤ‚µ‚ـ‚¤‚±‚ئ‚ھ‚ ‚éپB‚±‚ê‚حپA1ƒtƒŒپ[ƒ€‚¸‚آ’ا”ِ‚ًچs‚¢‚ب‚ھ‚çٹîڈ€ˆت’u‚ً•د‚¦‚ؤ‚¢‚Driftƒ‚پ[ƒh‚ج“ء’¥‚إ‚ ‚éپB‰و–ت‚ج‘—‚è‚â–ك‚µ‚ً‚·‚é‚ئ‚«‚حپA+/-1secƒ{ƒ^ƒ“‚ًٹˆ—p‚·‚é‚ئ‚و‚¢پB
ژ‹–ى“à‚ة•ت‚جچPگ¯‚ھژت‚ء‚ؤ‚¢‚ب‚¢‚ئ‚«‚حپAŒژ‰ڈ‚ة‹P“_‚ھ‚ ‚ê‚خ‚»‚ê‚ًObject 2‚ئ‚µ‚ؤ—ک—p‚·‚éپB‚½‚¾‚µپA‚±‚جڈêچ‡‚حپAŒژ‚ئچPگ¯‚ح‘ٹ‘خˆت’u‚ً•د‚¦‚ؤ‚¢‚邱‚ئ‚©‚çپAƒrƒfƒIƒtƒ@ƒCƒ‹ڈم‚ج2‚آ‚جƒtƒŒپ[ƒ€‚ة‚¨‚¢‚ؤˆت’u‚ ‚ي‚¹‚ً‚¨‚±‚ب‚¤پBLiked Tracking‚ج2‚آ‚جSetƒ{ƒ^ƒ“‚ً‚»‚ꂼ‚êƒrƒfƒI‚جژٹش“I‚ة‘پ‚¢ƒtƒŒپ[ƒ€‚ئ’x‚¢ƒtƒŒپ[ƒ€‚إ‰ں‚µ‚ؤ‚¨‚‚ئپALimovie‚ج‘ھŒُ•”‚حŒژ‚ج‹P•”‚جˆت’u‚©‚çŒvژZ‚µ‚ؤپAچPگ¯‚ج“®‚«‚ًˆê’è‚ة•غ‚آ‚و‚¤‚ةˆع“®‚·‚éپB ‚±‚ê‚ة‚و‚èپAچPگ¯‚ً—ک—p‚µ‚½Linked Tracking‚ئ‚ظ‚ع“¯—l‚جŒّ‰ت‚ً“¾‚邱‚ئ‚ھ‚إ‚«‚éپB
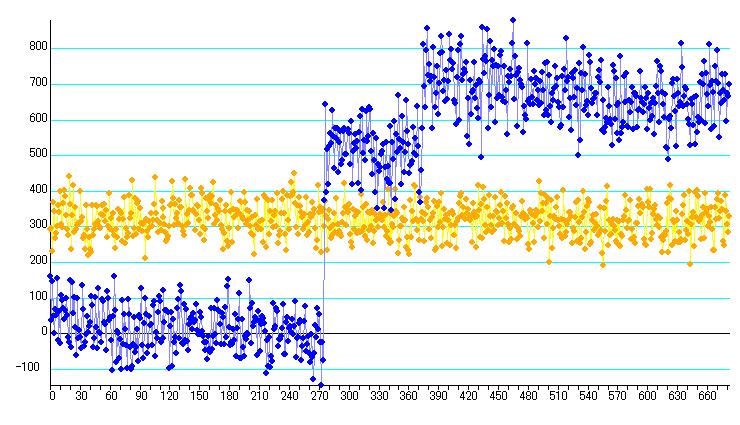
‚RپDLinked Tracking‚جŒّ‰ت
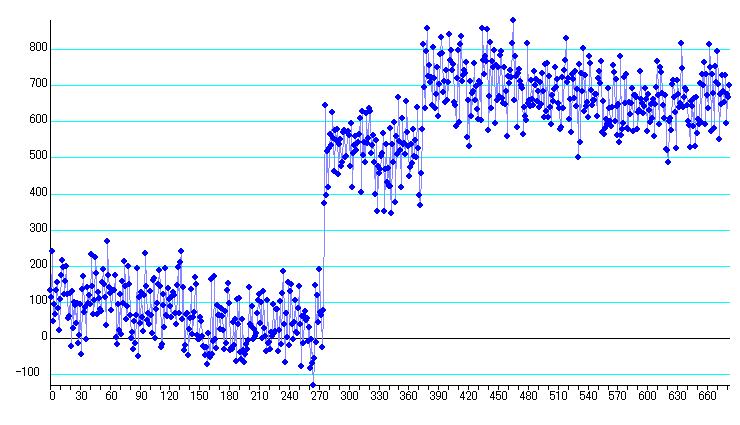
گ}‚R‚حپALinked Tracking‚ً—p‚¢‚ؤ‘ھ’肵‚½ƒOƒ‰ƒt‚إ‚ ‚éپBپ@گ}‚S‚جLinked Tracking‚ًژg—p‚µ‚ب‚©‚ء‚½ڈêچ‡‚جŒ‹‰ت‚ئ”ن‚ׂؤپAچإ‚à‘ه‚«‚ب‘ٹˆل“_‚حپAگ¯‘œڈoŒ»‘O‚ج’l‚إ‚ ‚éپBLinked Tracking ‚ً—p‚¢‚½ڈêچ‡‚ھ‚ظ‚ع‚O‚إ‚ ‚é‚ج‚ة‘خ‚µپA—p‚¢‚ب‚©‚ء‚½‚ئ‚«‚ح150‚ئ‚¢‚¤چ‚‚¢’l‚ًژ¦‚·پB‚±‚ê‚حپAAperture‚ھ’n‹…ڈئ‚إ–¾‚é‚‚ب‚ء‚½Œژ‰ڈ‚ًŒں’m‚µ‚ؤپAگ¯‘œ‚جڈêچ‡‚ئ“¯—l‚ة–¾‚é‚¢•”•ھ‚ً’†گS‚ة’u‚‚و‚¤‚ةˆع“®‚µ‚½‚½‚كپA’n‹…ڈئ‚ج–¾‚邳‚ھ‘ھ’肳‚ê‚ؤ‚¢‚邽‚ك‚إ‚ ‚éپB‚»‚ê‚ة‘خ‚µ‚ؤLinked Tracking‚جڈêچ‡‚حپAObject 2 ‚ج‘ھŒُ—جˆو‚حپAObject 1‚ةƒٹƒ“ƒN‚µ‚ؤ‚¨‚èپATracking Radius‚ًڈ¬‚³‚گف’肵‚½ڈêچ‡‚ة‚حپAŒژ‰ڈ‚ة‘ه‚«‚“ü‚èچ‚ق‚±‚ئ‚ح‚ب‚¢پBگ¯گHٹد‘ھ‚©‚çƒRƒ“ƒ|پ[ƒlƒ“ƒg‚ج“™‹‰‚ً“¾‚éچغ‚ةپAگ¯‘œڈءژ¸ژ‚ج’l‚حگ¸“x‚ة‘ه‚«‚‰e‹؟‚·‚éپB’n‹…ڈئ‚إŒژ‚جˆأ•”‚ھ‚ح‚ء‚«‚è‚ئ”F‚ك‚ç‚ê‚é‚ئ‚«‚ة‚حپA‰آ”\‚بŒہ‚èLinked Tracking‚ً—p‚¢‚½•û‚ھ‚و‚¢پB
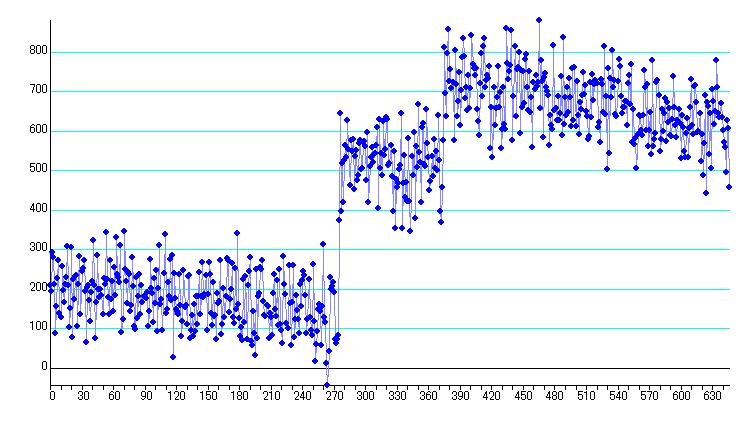
‚ـ‚½پAگ}‚T‚ةپAŒژ‚ج‹P“_‚ًٹîڈ€‚ة‚µ‚½Linked Tracking‚جŒ‹‰ت‚ًژ¦‚·پB‚±‚جڈêچ‡‚àپAچPگ¯‚ة‚و‚éLinked Tracking‚ً—p‚¢‚½ڈêچ‡‚ئ“¯—l‚ةگ¯‘œ‚جڈءژ¸ژ‚ج’l‚ة‘ه‚«‚ب‰ü‘P‚ھ‚ف‚ç‚ê‚éپB
گ}‚Rپ@“¯ˆêژ‹–ى‚ةژت‚ء‚ؤ‚¢‚éچPگ¯‚ًٹîڈ€‚ئ‚µ‚½Linked
Tracking‚ة‚و‚é‘ھ’茋‰ت
گ}‚Sپ@Linked
Tracking‚ً—p‚¢‚ب‚¢ڈêچ‡‚ج‘ھ’茋‰ت
گ}‚Tپ@Œژ‰ڈ‚ج‹P“_‚ً—ک—p‚µ‚½Linked
Traking‚ة‚و‚é‘ھ’茋‰ت
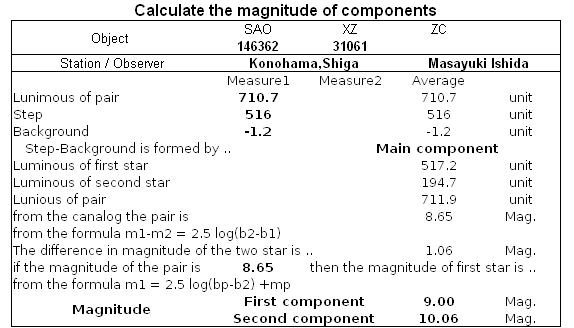
‚SپDƒRƒ“ƒ|پ[ƒlƒ“ƒg‚ج“™‹‰
Limvie Ver.0.9.27 ‚حپAژw’肳‚ꂽ‹وٹش‚جŒُ—ت‚ج•½‹د’l‚ئ•Wڈ€•خچ·‚ًŒvژZ‚·‚é‹@”\‚ًژ‚ء‚ؤ‚¢‚éپBپ@Ver 0.9.27b‚إ‚حپAAveragingƒ{ƒ^ƒ“پAVer 0.9.27b‚إ‚حNoise Reduction ƒ{ƒ^ƒ“‚ًƒNƒٹƒbƒN‚µ‚ؤŒ»‚ê‚éƒEƒCƒ“ƒhƒE‚ة‚»‚ج‘€چى•”‚ھ‚ ‚éپB‘€چى‚حٹب’P‚إپAŒvژZ‘خڈغ‚جٹJژnƒtƒŒپ[ƒ€‚ئڈI—¹ƒtƒŒپ[ƒ€‚ج”شچ†‚ً“ü—ح‚·‚邱‚ئ‚ة‚و‚è‚»‚ê‚ç‚ج“Œv—ت‚ھŒvژZ‚³‚êپA•\ژ¦‚³‚ê‚éپB
Œژ‚جƒJƒXƒv‚ة‹ك‚¢ˆت’u‚إ‹N‚±‚ء‚½‰†•ء‚إ‚ ‚邱‚ئ‚©‚çپAŒژ‚ج–¾•”‚ج‰e‹؟‚ھ‚ ‚èپAŒژ‚ھ‰“‚´‚©‚é‚ة‚آ‚ê‚ؤ‚ي‚¸‚©‚¸‚آ‘ھ’è’l‚ھŒ¸ڈ‚·‚éŒXŒü‚ة‚ ‚éپB‚»‚ê‚ة‘خ‚µ‚ؤ‚حپA‰½‚ç‚©‚ج•âگ³‚ھ•K—v‚إ‚ ‚é‚ھپAچ،ŒمŒں“¢‚ًچs‚¤‚±‚ئ‚ئ‚µپA‚±‚±‚إ‚حˆب‰؛‚ج‚و‚¤‚بٹب•ض‚ب•û–@‚ً—p‚¢‚ؤ‚¨‚پB‚±‚جŒ»ڈغ‚إ‚حپAƒXƒeƒbƒv‚ج’·‚³‚ھ90ƒtƒŒپ[ƒ€‚ظ‚ا‚ئپA‚»‚ê‚ظ‚ا’·‚‚ب‚¢‚±‚ئ‚©‚çپAڈoŒ»‘O‚ئ”؛گ¯ڈoŒ»Œم‚ة‚آ‚¢‚ؤ‚àپA“¯‚¶ƒtƒŒپ[ƒ€گ”‚إ”نٹr‚·‚邱‚ئ‚ة‚و‚èپAŒژ‰ڈ‚ج‰e‹؟‚ًچإڈ¬Œہ‚ئ‚ب‚é‚و‚¤‚ة‚µ‚½پB‘ھ’茋‰ت‚ً•\‚P‚ةژ¦‚·پB‚ـ‚½پA“™‹‰‚جŒvژZ‚ئŒ‹‰ت‚ً•\‚Q‚ةژ¦‚·پB
ƒڈƒVƒ“ƒgƒ“ڈdگ¯ƒJƒ^ƒچƒO‚إ‚ح
09376+1528A 2479 1912 1995 15 258 206 0.3 0.2 9.23 9.87 F8
XZ Double Star File ‚ةٹî‚أ‚پAOccult‚جڈdگ¯‚ج•\ژ¦‚ح
98678 is double : 8.6 9.2 0.26" 236.9
‚إ‚ ‚éپB
ˆê•ûپAگخ“cژپ‚ة‚و‚éٹد‘ھ‚©‚瓾‚ç‚ꂽ’l‚إ‚حپAژهگ¯‚ئ”؛گ¯‚ھ‚ظ‚ع1“™‹‰ˆظ‚ب‚éپBگخ“cژپ‚جٹد‘ھژ‚جƒKƒ“ƒ}•âگ³‚حOFF‚إ‚ ‚éپBƒrƒfƒIƒJƒپƒ‰WAT100N‚حپAƒTƒ`ƒŒپ[ƒVƒ‡ƒ“‚ً‹N‚±‚µ‚½ڈêچ‡‚â‹ة’[‚ب’لڈئ“x‚إ‚ ‚éڈêچ‡‚ًڈœ‚«پAŒُ—ت‚ئڈo—ح‚جٹش‚ةچ‚‚¢’¼گüگ«‚ھٹm”F‚³‚ê‚ؤ‚¢‚éپB“™‹‰‚ةٹض‚µ‚ؤپAƒJƒ^ƒچƒO‚ج‹Lچعژ–چ€‚ة‚آ‚¢‚ؤپAŒں“¢‚ھ•K—v‚إ‚ ‚éپB
گ}‚Uپ@Œُ—ت‚ج•½‹د’l‚ج‘ھ’è
•\‚Pپ@Œُ—ت‚ج‘ھ’è’l
|
|
ٹJژnƒtƒŒپ[ƒ€ |
ڈI—¹ƒtƒŒپ[ƒ€ |
ƒtƒŒپ[ƒ€گ” |
Œُ—ت•½‹د |
•Wڈ€•خچ· |
|
گِ“ü’†پ@ |
No.181 |
No.271 |
91 |
-1.2 |
53.2 |
|
ژهپ@گ¯ |
No.278 |
No.368 |
91 |
516.0 |
69.0 |
|
ژهگ¯پ@پ{پ@”؛گ¯ |
No.380 |
No.470 |
91 |
710.7 |
79.0 |
•\‚Qپ@“™‹‰‚جŒvژZ
‚TپDŒ»ڈغژچڈ
Limovie 0.9.27‚حپAKIWI-OSD‚ئ‚ئ‚à‚ةپATIVi‚جژچڈ‚àپAژپE•ھپE•b‚ئ‚à‚ة“ا‚فژو‚é‹@”\‚ھ‰ء‚¦‚ç‚ꂽپBTIVi‚حپA•¶ژڑ‚جŒ`ڈَ‚ھŒإ’肳‚ê‚ؤ‚¢‚éKIWI-OSD‚ئˆظ‚ب‚èپA‰،•ûŒü‚ةگLڈk‚ھژ©—R‚إ‚ ‚邱‚ئ‚©‚çپAKIWI-OSD‚ظ‚اگ³ٹm‚ة“ا‚فژو‚ê‚é‚ي‚¯‚إ‚ح‚ب‚¢پB•¶ژڑƒTƒCƒY‚ً•Wڈ€‚جڈَ‘ش‚ةƒZƒbƒg‚µ‚ؤ‚¨‚‚ئ“ا‚فژو‚è‚â‚·‚‚ب‚éپB‰و–ت‰E‘¤‚ج KIWI ‚ةƒ`ƒFƒbƒN‚ً“ü‚êپA‰و–تچ¶‰؛‚جTIViƒ‰ƒWƒIƒ{ƒ^ƒ“‚ًƒNƒٹƒbƒN‚µ‚ؤ‚©‚çپA‰و‘œڈم‚جپuژ (hour)پv‚ًژ¦‚·گ”ژڑ‚جچ¶ڈم‹÷‚ًƒNƒٹƒbƒN‚·‚邱‚ئ‚إژچڈ•\ژ¦‚ً”Fژ¯‚·‚éپB‚ب‚¨پA•\ژ¦‚³‚ê‚é“ا‚فژو‚è’l‚ھگ³‚µ‚‚ب‚¢ڈêچ‡‚حپAKIWI‚ج•\ژ¦‚جچ¶‚ة‚ ‚éThreshold‚ج’l‚ً—lپX‚ةگف’肵‚ؤپA‰و‘œڈم‚جگ”ژڑ‚جچ¶‹÷‚ًƒNƒٹƒbƒN‚·‚éپA‚ئ‚¢‚¤‚±‚ئ‚ًŒJ‚è•ش‚·‚±‚ئ‚إپAچإ“K’l‚ً’T‚·•K—v‚ھ‚ ‚éپBƒoƒbƒNƒOƒ‰ƒEƒ“ƒh‚ھڈ[•ھˆأ‚¢‰و‘œ‚جڈêچ‡‚حƒfƒtƒHƒ‹ƒg‚ج110پAƒoƒbƒNƒOƒ‰ƒEƒ“ƒh‚ھ–¾‚é‚¢ڈêچ‡‚ح150پ`160‚ةگف’肵‚½ŒمپAگ”ژڑ‚ج‰،‚ًƒNƒٹƒbƒN‚·‚é‚ئ‚و‚¢پBŒ»چف(Nov.4 2007)‚ج‚ئ‚±‚ëپA‚±‚ج‹@”\‚حƒeƒXƒg’†‚إ‚ ‚邱‚ئ‚©‚çپA‚¨‹C‚أ‚«‚ج“_‚ھ‚ ‚ê‚خ‚¨’m‚点‚¢‚½‚¾‚«‚½‚¢پB‚ب‚¨پAThreshold’l‚حپAژه‚ئ‚µ‚ؤگ”ژڑ‚جˆت’u‚ً”Fژ¯‚·‚éپiگآ‚¢کg‚إˆح‚قپj‚½‚ك‚ة‚ح‚½‚ç‚¢‚ؤ‚¨‚èپAˆت’u‚ج”Fژ¯Œم‚جŒآپX‚جگ”ژڑ‚ج“ا‚فژو‚è‚ة‚ح‚ظ‚ئ‚ٌ‚اٹضŒW‚µ‚ب‚¢پB
ژچڈ‚ج•b•\ژ¦‚حپAƒtƒBپ[ƒ‹ƒhکIŒُڈI—¹ژ‚جگ¸–§ژچڈ‚ً•\‚·پB’تڈي‚جƒtƒŒپ[ƒ€’Pˆت‚ج‘ھŒُ‚جڈêچ‡‚حپA•b•\ژ¦‚جچ¶‘¤‚ة‚ ‚é‚à‚ج‚ًƒtƒŒپ[ƒ€’†‰›ژچڈ‚ئ‚µ‚ؤˆµ‚¦‚خ‚و‚¢پBLimovie‚جDiffarction ‹@”\‚جOffset’l‚ًپA‚»‚ج•bگ”‚ة‰ءژZ‚·‚邱‚ئ‚إپAƒVƒ~ƒ…ƒŒپ[ƒVƒ‡ƒ“‚ة‚و‚èگ„’肳‚ꂽŒ»ڈغژچڈ‚ً“¾‚邱‚ئ‚ھ‚إ‚«‚éپB
گ}‚Vپ@گ}‚Wپ@‚ةپA‰ًگح‚ج—lژq‚ًژ¦‚·پB‚±‚ê‚و‚èپAŒ»ڈغژچڈپA
|
ژهگ¯ڈoŒ» |
05h 16m 19.05s +/- 0.01s |
|
”؛گ¯ڈoŒ» |
05h 16m 22.43s +/- 0.02s |
‚ً“¾‚½پB
‚±‚ê‚و‚èپAژهگ¯‚ج‚ف‚ھڈoŒ»‚µ‚ؤ‚¢‚½ژٹش‚حپA2.38•b +/- 0.03•b‚إ‚ ‚éپB
—\•ٌ‚و‚èٹْ‘ز‚³‚ê‚錻ڈغ‚جژٹشچ· D‚حپA
D = absolute( cos( Pm - Ps) ) * Se / Rv
Pm : Œ»ڈغ‚جŒژ‰ڈ‚ة‚¨‚¯‚éˆت’uٹpپB
Ps : ژهگ¯‚ة‘خ‚·‚é”؛گ¯‚جˆت’uٹp
Se : ژهگ¯‚ئ”؛گ¯‚ج—£ٹp
Rv : Relative Velocity , چPگ¯‚ة‘خ‚·‚éŒژ‚ج‘ٹ‘خٹp‘¬“x‚جپAŒژ‰ڈ‚ئگ‚’¼‚ب•ûŒü‚جگ¬•ھ
‚ة‚و‚èŒvژZ‚إ‚«‚éپB
Occult Ver 3.6‚ة‚و‚é—\•ٌ‚حپA”98678 is double : 8.6 9.2 0.26" 236.9”پ@‚إ‚ ‚èپA‚±‚ê‚و‚èپAٹْ‘ز‚³‚ê‚錸ڈ‚جژٹشچ·‚حپA1.64•b‚إ‚ ‚éپB
ٹد‘ھ‚©‚ç‚جگ„’è’l‚حپA‚±‚جٹْ‘ز’l‚ة‘خ‚µ‚ؤ–ٌ1.5”{‘ه‚«‚ب’l‚ئ‚ب‚ء‚ؤ‚¢‚éپBگ¯گHٹد‘ھ‚©‚瓾‚ç‚ê‚éژٹشچ·‚حپAŒژ‰ڈ‚جŒ`ڈَ‚ة‚و‚ء‚ؤ‚à•د‚ي‚ء‚ؤ‚‚邱‚ئ‚©‚çپAژهگ¯‚ئ”؛گ¯‚جˆت’uٹضŒW‚ة‚آ‚¢‚ؤ‚حپA‘¼‚جٹد‘ھ‚ئ‚ ‚ي‚¹‚ؤٹm”F‚µ‚ؤ‚¢‚•K—v‚ھ‚ ‚éپB
گ}‚Vپ@‰ٌگـƒVƒ~ƒ…ƒŒپ[ƒVƒ‡ƒ“‚جƒtƒBƒbƒeƒBƒ“ƒOپiژهگ¯‚جڈoŒ»پj
گ}‚Wپ@‰ٌگـƒVƒ~ƒ…ƒŒپ[ƒVƒ‡ƒ“‚جƒtƒBƒbƒeƒBƒ“ƒOپi”؛گ¯‚جڈoŒ»پj