初版:2005.10.23
改訂:2006.3.09
改訂:2006.3.09
-
光電測光等による星食の現象時刻は、得られた光度変化曲線(light curve)上で「隠される前の恒星の光度(光量)の25%になった」ときである、とされています。なぜ25%なのでしょうか? そこで、星食と光度曲線について調べてみました。また、Limovieによる現象時刻の求め方についても考えてみました。
なお、私たちがILOCに観測報告をする際には、現象の「始まりの時刻」と「終わりの時刻」を記載すれば充分で、以下の議論が必要なわけではありません。しかし、実際の観測では数フレームにわたる減光や増光が観察されることも多く、その原因について理解が深まれば、観測に役立つことも多いでしょう。ここでは、シミュレーションの条件について、距離と速度を一定として考えることができることから、月縁による掩蔽についてのみ考えてみます。小惑星による星食については、距離や影の通過速度が異なるだけで、基本的には同じように考えることができます。
-
月による星食について考えてみます。星は点光源で、平行光線として進んできます。この光は、月のように遮蔽するものがあると、その縁辺部で回折を起こします。
このようすは、次のサイトにわかりやすく解説されています。
量子光学ノート
-
静岡大学工学部 岡部拓也先生の「講義ノート」です。16行目にある、「フレネル回折」をごらんください。
-
星食を利用した恒星の視直径測定についての論文のPDFファイルです。光度曲線についてわかりやすく記述されているとともに、星食の時刻観測に関しても参考になる内容です。(Mar.10 2006現在、リンク切れしているようです。)
Mondal(上記の論文)によれば、点光源の恒星の光を、進行方向に垂直な、充分直線と見なせるような月縁がさえぎるとき、光の強度Iの変化は次の式で表すことができます。
 | (1-1) |
| ここで、Ioは恒星の光度、C(ω),S(ω)は、フレネル積分で、以下の式で表されます。 | |
 | (1-2) |
 | (1-3) |
| また、ωはフレネル数で、以下のように表されます。 | |
 | (1-4) |
| ここで、λは光の波長、Dは月までの距離、vは月が横切る速度です。 | |
t(時間)については1millisecondごとに。光の波長については、400nmから780nmまで、5nm毎の単色光について。後に述べる φ(恒星の直径)については1mas(角度の1ミリ秒)のステップで近似計算を行いました。望遠鏡の口径については、多くの場合数十センチ以下と考えられますから、考慮に入れてありません。
また、月縁が月の進行方向に対して垂直ではなく傾いていた場合には、進行方向と垂直な方向を基準として月縁がなす角をθとすると、上記の時間に 1/cosθ を乗じた分だけ時間が伸びた形となると考えられます。これについては後に述べます。
多くの恒星は視直径がきわめて小さく、点光源として扱うことができます。その場合のライトカーブは次のように表されます。(Fig1 , Fig2)
Fig.1 月縁が月の進行方向に対して垂直な場合の光度変化。
月の移動速度500m/sec、月までの距離380000km、光については400nm から 780nm までを積分した白色光として計算。
Fig.2 時間軸方向にズームアップした図。目盛りを1フレームごとにつけてある。
これを見ると、幾何学的現象時刻の約20ミリ秒前から減光が始まり、50ミリ秒後にはほぼ減光が終了する、ということがわかります。これは長さにして約2フレーム分です。また、現象時刻(幾何学的中心時刻)の光量は、(1-1)〜(1-4)の式からもわかるように、恒星が隠される前の光量の25%となります。
-
(1) 月縁が月の進行方向と垂直な場合
ビデオカメラは、フレームと呼ばれる1画面を単位として、1秒間に30回の記録をしています。1フレームは約30分の1秒(33ミリ秒)であり、その分解に1ミリ秒の精度が必要とされるフレネルパターンを読み取ることはできません。しかし、複数のフレームにわたって減光が観察されることは、実際の観測ではよくみられることです。そして、その場合は、減光がフレームに対してどのようなタイミングで起こるかによって、フレームの光度の変化がちがってくるはずです。上で求めた光度曲線を使って、ビデオのフレームに33ミリ秒蓄積された場合を図で表してみました。
Fig.3 フレームの光度変化 (月縁が月の進行方向に垂直な場合)
こうしてみると、減光はほぼ3フレームにわたって観察できることがわかります。ただ、この3フレーム目の値は、0.05以下ときわめて小さく、実際の観測ではノイズに埋もれてほとんど見えないだろうと考えられます。したがって、観測においては、2フレームにわたる減光が起こっているようにみえます。
図中の1の場合は、大きな減光をはさんだ2フレームの切り替え時点が幾何学的現象時刻です。また、図の2から6のように、明確な中間値を持つフレームが存在する場合は、幾何学的現象時刻は、そのフレーム内に存在することになります。
このように、月縁が月の進行方向に対して垂直であるときには、簡単に現象時刻を特定することができます。
(2) 月縁が月の進行方向に対して垂直でない場合
 Fig.4 | 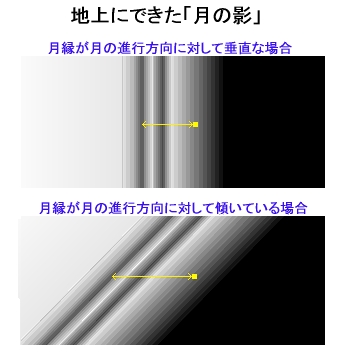 Fig.5 |
θの値のいくつかについて、光度変化のようすをシミュレートしてみました。結果を下図に示します。
Fig.6 月縁が月の進行方向と垂直な方向に対して傾いている場合の光度変化
これをもとに、フレーム毎の光量の変化を調べてみました。
[ 月縁が月の進行方向に垂直な方向から45°傾いている場合 ]
「垂直な場合」と比べて、変化が多少「なだらか」になり、ノイズやシンチレーションの影響が小さければ、3フレームにわたる減光(2つの中間値を持つ)が観察されるようになります。しかし、ビデオのフレームから現象時刻を求める上では、「垂直な場合」と大きなちがいはありません。2フレームにわたって減少する場合は、現象時刻は中間値のフレームに含まれます。
Fig.7 フレームの光度変化 (θ=45°)
[ 月縁が月の進行方向に垂直な方向から60°傾いている場合 ]
時間軸方向に「垂直な場合」の2倍引き延ばされています。ここまでくると減光に100ミリ秒近くを要するため、33ミリ秒の幅を持つビデオのフレームの記録にも段階的な減光として現れてきます。通常は「3フレームにわたる減光(2つの中間値を持つ)」として観測されると考えられます。
Fig.7 フレームの光度変化 (θ=60°)
(3) 視直径の大きい恒星の場合
恒星が比較的近距離にあり、その直径が大きい場合(たとえば、アンタレスは視直径が角度の40ミリ秒とされています)、回折パターンは点光源のものと異なってきます。視直径が10ミリ秒を超えるとその影響が大きくなってきます。そこで、いくつかの視直径についてシミュレートしてみました。
[ 視直径が大きい恒星の回折パターン ]
赤色が回折パターンです。比較のために、点像の場合を水色で示します。
 Fig.8 恒星が視直径を持つ場合の光度変化
Fig.8 恒星が視直径を持つ場合の光度変化時刻測定にとって注意しなければならないのは、現象時刻(幾何学的中心時刻)の光量の値が25%ではなくなることです。
20masの場合は35%、40masでは47パーセントに達します。
[ 視直径=20ミリ秒 の場合 ]
ビデオのフレームで見る限りは、点光源の場合とほぼ同じです。ただ、前に述べたように、幾何学的中心の光量に注意が必要です。
Fig.8 フレームの光度変化 (視直径=20ミリ秒の場合)
[ 視直径=40ミリ秒 の場合 ]
減光時間は100ミリ秒ほどになります。ビデオでは3フレームにわたる減光(2つの中間値をもつフレームがある)が観察されます。
Fig.9 フレームの光度変化 (視直径=40ミリ秒の場合)
-
これまで、様々な場合についてフレームの値の変化を見てきました。これらをもとに、現象時刻を求める方法をまとめてみます。
Fig.10 進行方向と垂直な方向からの月縁の傾き 60°の場合の光度変化
この図は、点光源として扱うことのできる恒星が、月の進行方向に垂直な方向から60°の傾きを持つ月縁に掩蔽される場合です。
まず、時刻の記録について考えてみますと、タイムインポーザTIViは、フィールド毎、図中のt0,t1,t2,の位置で時刻を書き込んでいます。GPSの正秒に同期したLEDをカメラで撮影して調べてみたところ、筆者の使用するビデオカメラとレコーダーでは、LED光が観測される1ミリ秒前にt1の表示が正秒を示す、という結果となりました。t0とt1のどちらでフレームの時刻を表すかが問題なのですが、フレームの中央を示すt1で代表されると考えると、この表示はUTCに対しては1ミリ秒あるいはそれ以下で結びついている、ということができます。なお、この精度は使用する機器によって変わってくると考えられますので、時刻装置のLED光とインポーザのタイミングの関係をよく調べておく必要があります。
次に、光量についてですが、フレームごとに測定される光量の値は、t0からt2の間の光量が積分されたものと考えることができます。その間の変化が直線であれば、得られた光量は、t1の時刻の光量を示しているといってよいことになります。 通常よく行われるように、フレーム毎の光度変化を折れ線グラフで表すと、図のマゼンタ(赤紫)色の線のようになります。このようにある程度ゆっくりした現象であっても、光度の変化が急激に進むことから、折れ線グラフは、現象の変化を示す水色の曲線から大きく外れることはありません。
この光度変化において誤差として含まれてくるものは、(1)系統誤差 (2)ノイズ (3) 大気のゆらぎ が考えられます。CCDの受ける光量が十分であれば、その影響のほとんどは (3)大気のゆらぎ です。この「大気のゆらぎ」は、観測される光量に「乗算」される形で現れます。(それに対してノイズは加算される形で現れます。)このことから、減光するほど(比率ではなく)値としては小さくなりますので、「折れ線グラフ」を真の値から大きく遠ざけるはたらきは持ちにくいことになります。ただし、バックグラウンドに多くのノイズがありS/N比が低い場合には、時刻精度に与える影響が大きくなります。その場合には、誤差を大きく見込んだ記録と報告が必要になります。
以上より、実際の観測においては、折れ線グラフが、恒星の明るさ(光量)の25%の値となる時刻を調べ、その最寄り位置のフレームの時刻を求めればよいことになります。誤差については、上記の理由で、S/N比が十分である限り、±1フィールド以内に収まるはずです。
なお、以上は、光量変化と時刻測定のみを考慮に入れた場合の議論です。実際には、観測地の位置の測定精度も関係してきます。月の影の移動速度として500m/秒を仮定すると、1フレームで15m移動することになります。GPSによる測定の精度が10m程度とされていますから、1フレーム分は誤差として見込まなければなりません。このことから考えて、求める時刻数値には±1フレームの誤差を見込むことが適切であると考えられます。
-
以上のシミュレーションと実際の観測を比較してみましょう。
Fig.11 アンタレス食の光量変化
Fig.11 は、筆者の観測した、2005年3月30日のアンタレス食のようすです。シミュレーションのグラフと観測のグラフが、時間軸と恒星の明るさの平均値についてスケールが同じになるように作成し、両者の差が最小になると考えられる位置で重ね合わせてみました。
これによると、増光のようすが、両者でよく一致していることがわかります。また、幾何学的現象時刻と考えられる47%の位置については、ほぼ一 致しています。
Fig.12 XZ14320のグレージングにおける光量変化
Fig.12 は、2005年11月22日のXZ14302のグレージングにおける出現のようすです。
グレージングの場合、現象位置の月縁はほぼ月の進行方向と平行に近いと考えられます。そのため、10フレーム以上もかかってゆっくりと出現しています。青い折れ線が、観測より得たライトカーブ、赤い曲線が、フィッティングさせた回折のシミュレーションです。両者はよく一致しており、これから得た月縁の「傾き」は、月の進行方向と垂直な方向とのなす角が約84°であったと考えることができます。
5.ILOCフォーマットとの関係
-
ILOCの報告フォーマットでは、ゆっくりと進む現象については、カラム56に、潜入の場合は「潜入のはじまり」を、出現の場合は「出現の終わり」を明記することで、本稿で述べたような現象を報告できるようになっています。例として2000年10月19日の55Gemの接xz29252食の場合を(わかりやすく一部コメントを加筆して)示します。
つまり、上記に見てきたように、大まかに言えば「減光期間中の中央に幾何学的中心がある場合がほとんどである」ことを利用して、報告から現象時刻の決定をしていると考えることができます。