Limovie 0.9.28の新機能
Jan.13 2008
宮下和久
Limovie新バージョン0.9.28をリリースしました。このバージョンは、回折シミュレーションの機能と計算速度について改良したものです。これにより、恒星の視直径を考慮した回折シミュレーションが可能となりました。また、回折シミュレーションに必要な月や小惑星の影の移動速度および小惑星までの距離について、予報ソフトOCCULTやSteve Preston氏の予報の数値を用いて計算する機能を加えました。最新バージョンのLimovieは ここ Limovie 0.9.28 からダウンロードできます。
新機能について
I. Object's Velocity Calculator
この機能は、回折シミュレーションを行うのに必要な、月や小惑星の距離や影の移動速度の計算を、OCCULT4やSteve Preston氏の予報に記述されたパラメータを入力するだけで、容易に行うことのできる「計算機」機能です。
1. 月の影の速度の計算
(1) OCCULT4 より、 Horizontal Scale Factor を求める
[OCCULTの操作]
1)
Lunar Occultationメニューから“Prediction
for Single Sites”を選ぶ。
2) 観測地および現象の日時をセット(選択)し、“Event for Site”グループの中の Occultationボタンをクリックする。
![]()
3) 解析したい現象を右クリックし、メニューから“Compute graze”を選んで左クリックする。
その現象のグレージングに関する情報が表示される。
4) 上の図に示した、Horizontal Scale Factor が、影の速度の計算に必要なパラメータである。
[Limovieの計算機能の使い方]
1) Limovieの Fresnel Diffraction ウインドウを表示させる。(グラフが表示されていないと呼び出せません。)
2) Shadow Velocity入力エリアをダブルクリックする。
3) パラメータ計算機(Object's Velocity Calculator)ウインドウが開く
ここで、Horizontal Scale Factorを入力し、Write to diffraction simulation parameter ボタンをクリックする。
月の影の速度が計算され、Fresnel
Diffraction ウインドウのShadow
Velocity 入力エリアに自動的にセットされる。
2. 月の距離の入力
月の距離は、LOW(Lunar Occultation Workbench) から直接得ることができる。
この数値(上図の場合384671(km))を、Fresnel Diffraction ウィンドウのDistanceエリアに入力する。
3. 回折シミュレーションとのフィッティング
3-1 各モードの説明
[for Grazing] モード
(重星でない)単一の星について考えると、回折光の強度変化は、
[月・小惑星の距離][影の速度][光の波長][コンタクトアングル][恒星の視直径][望遠鏡の口径] によって一意に定まる。
ここで、アマチュアの使う望遠鏡の口径は一般に小さいので、考慮に入れないことにする。また、通常の場合、恒星の視直径はゼロとして考えてよい。光の波長については、LimovieではCCDの感度の範囲をほぼカバーする形で計算がなされている。ここで、距離と速度は定数として扱うことができる。ここで、複数の時間の光強度が観測されていれば、コンタクトアングルがゼロのときのライトカーブのシミュレーションを用意しておいて、それをどれだけ横に引き伸ばしたらフィットするかを調べることにより、そのときの「月の進行方向に対する月縁の傾き」が求められる。更に、そのようにして求められたライトカーブについて、光量が1/4になった時点を調べれば、現象時刻を求めることができる。まとめると、一つの現象から、現象時刻と月縁の傾きを求めることができることになる。これがfor Grazingモードの目的と動作である。
[for Occultation] モード
上記のfor Grazingモードを用いるためには、「複数の測点」すなわちフィールドまたはフレームが必要である。また、精度の向上のためには測点は多いほどよい。グレージングのときには、数十フレームにもおよぶゆっくりした光量変化が観測されることもあるなど、for Grazingモードを用いる条件が整っていることが多い。それに対して、コンタクトアングルの小さい一般的な星食では、減光は瞬間的であり、中間の値を持ったフレーム(フィールド)がないかまたは1から2フレーム(フィールド)であることがほとんどである。更に、シンチレーションの影響で、光量変化は細かい振幅を持つことが多く、これらの「ノイズの大きい」「少ない数の」測点についてフィッティングを行っても、誤差が大きくなってしまう。ただ、それらのデータについても、コンタクトアングルを指定したシミュレーションと比較することにより、現象時刻を求めることができる。Limovieは、与えられたデータに対して最もフィットする時間的な位置(位相)を自動的に計算して求め、統計的な誤差を1σとして求めることができるようプログラムされている。Limovieは、フレーム(フィールド)の露出中央時刻に対するオフセットで現象時刻を与えるようになっていることから、インサータの表示から読み取った(フィールド測光の場合には更に計算した)時刻数値に対してこの補正を行うことにより、「統計的に根拠のある」現象時刻を求めることができる。なお、Limovieの表示する誤差は、フィッティングの結果によるものであり、加速誤差はこのほかにも、観測地点の誤差や、シミュレーション作成時の「仮定」による誤差なども含まれていると考えられる。報告時には、+/- 0.5フレーム(フィールド)と、Limovieの与えた誤差を比較し、大きい方を採るとよい。
回折シミュレーションには、for Occultation と for Grazingの2つのモードがある。これらは次のように使い分けるとよい。
3-2 フィッティング機能の使い方
[for Occultation モード]
こちらの方が動作速度が速い。
まず、グラフの中で、光量が25%に最も近い値の点をクリックし、赤で表示されるようにしておく。
次に、OCCULT4 より読み取ったコンタクトアングル(CCT) の数値をContact Angleに入力する。なお、このとき数値がマイナスの時には自動的に絶対値が計算され、再表示される。(コンタクトアングルの正負はシミュレーションに影響しない。)また、このとき、回折パターンの変化の割合(fringe rate)が計算され、表示される。
for Occultationモードでは、フィッティングの前に必ずこの角度を入力すること。
ここで、Processing を for Occultation にし、Fit to Diffraction Curve ボタンをクリックすると、計算が開始され、しばらくすると最適値が表示される。現象中央時刻は黄色い線で表示され、同時に誤差表示もなされる。
[for Grazing モード]
様々な「傾き」について試行するため、for Occultationモードに比べて、ある程度の時間が必要である。
ここでも、まず、グラフの中で、光量が25%に最も近い値の点をクリックし、赤で表示されるようにしておく。
次に、Processing
を
for
Grazing にし、Fit
to Diffraction Curve ボタンをクリックする。しばらくすると、最もフィットした結果がグラフとして表示される。![]()
Fresnel
Diffractionウインドウには、現象中央時刻と共に、Contact
Angleとして、月の進行方向に対する月縁の傾きが表示される。これにより、月の地形を推定することができる。
II. 恒星の視直径の見積もり
この機能の操作は簡単である。
Star's Angular Diameter”ボックスをチェックする。この機能は、現在のところfor Occultationモードでのみ動作する。Grazingモードで使用すると、処理時間が長くなってしまうためである。
続いて、恒星の視直径を入力する。月の場合には、1ミリ秒刻みで変えることができる。先に入力した距離が月より遠くなると、小惑星の扱いになり0.01ミリ秒刻みで変更するようになる。
ここで“Fit to Diffraction Curve”ボタンをクリックすると、30秒ほどでライトカーブを出力する。
“Sum-Sqared Error” に表示される数字は、二乗誤差の合計である。視直径の数値を変えて何回かフィッティングをおこない、Sum-Squared Errorの値が最も小さくなるようにする。そのときの視直径の値が、求める「視直径」である。
なお、視直径が大きくなるのに伴い、現象中央の光強度は、25%より大きくなって、しだいに50%に近づいていく。その値は、Intensity at event centreの数値で知ることができる。
注意:
この視直径の機能を利用することは極めてまれであると考えられる。特に、通常の月による星食では、視直径が特に大きいとして知られている星に対して用いる程度であろうと思われる。なぜなら、最も視直径が大きいとされるアンタレスでも40ミリ秒角であり、
NTSC方式のカメラでは4から5フィールドにわたる光量変化が見られるにすぎない。他の多くの恒星は、視直径が認められたとしても高々20ミリ秒角であり、ビデオのフレームにその効果が現れることは少ないと考えられる。しかし、コンタクトアングルが大きくなるにつれ、解析可能なフレーム(フィールド)数も増えてくると、視直径の効果を見積もることができる場合もあると考えられる。また、小惑星による恒星食の場合、小惑星の移動角速度が比較的小さいことから、数フレームにわたる光量変化をとらえることができれば、恒星の視直径を推定することが可能である。
以上から、この視直径のシミュレーションが適用できるのは、少なくとも2個以上の中間値を持つフレーム(フィールド)が存在していることが必要であり、中間のフレームが一つだけの場合には適用すべきでない。
以下に一つの例を挙げる:
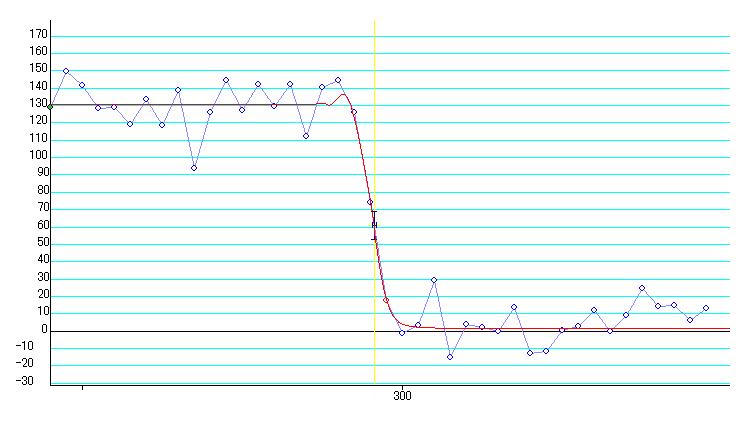
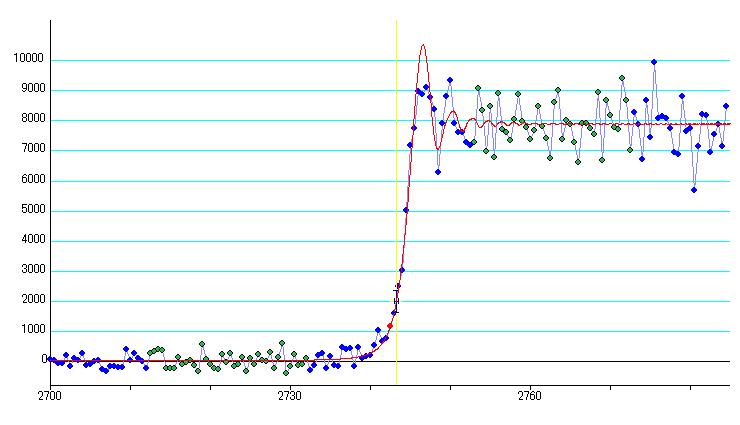
図1 luminous change of XZ4902 fit to star's diameter analysis.
上の図は、2006年12月31のすばる食におけるXZ4902の光量変化である。これに対して視直径を考慮したシミュレーションを行ってみた。恒星の視直径を18ミリ秒角とすると、きわめてよいフィットが得られた。しかし、これは「本当」だろうか?
プレアデスの距離は135pcとされている。もし18ミリ秒角の恒星があったとしたら、その実際のサイズは、地球の軌道の直径より大きくなってしまう。この星はA0型星とされており、そのような巨星となっていることは考えにくい。
図2は、恒星を点光源とした場合のシミュレーション(for Occultationモード)である。測定値の間に線を引いていることから、シミュレーションとずれているように見えるが、測定値はビデオのフィールドごとの露出により「積分」されていることから、「線」で比べることは適当でない。測点で比べれば、比較的よく一致しているといえる。フレーム(フィールド)露光のタイミングにより、中間の値ができる場合もあるからである。 ( このページ を参考にしてください。)
また、図3は、重星のシミュレーションに重ねてみたものである。こちらもよい一致を示す。
以上から、少ない測点に対しては、様々な「解釈」が成り立つことから、視直径を前提としたシミュレーションや解析を適用すべきではない。
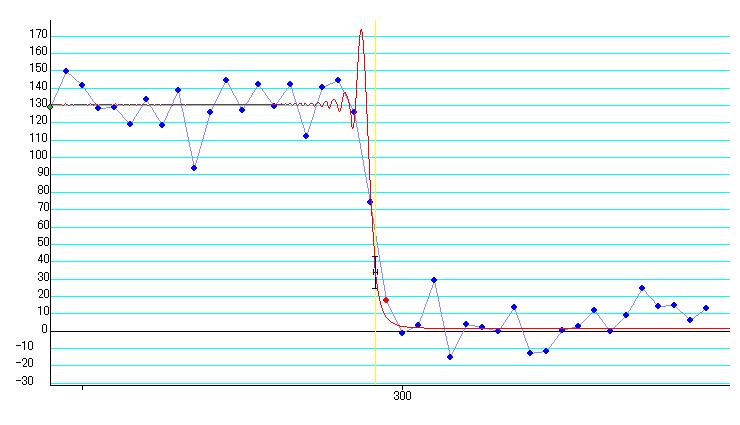
図2
The
result of simulation using point source model.
Parameters for this
simulation : Lunar velocity is 814m; lunar distance is 367240km;
contact angle is -7degree.
Simulation mode is “for
Occultation”.
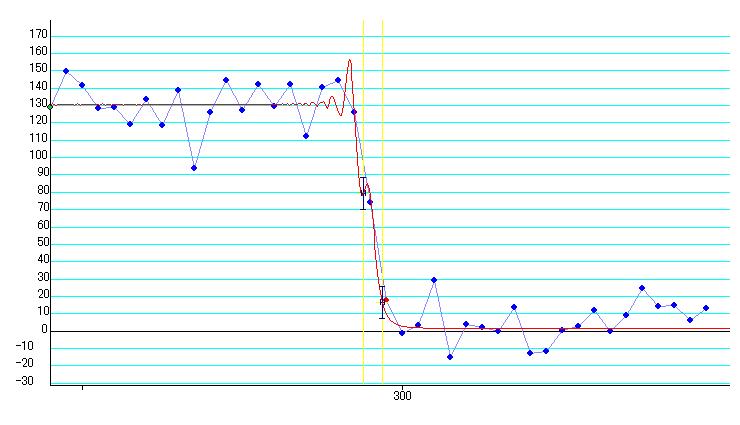
図3. The result of simulation using double model.