Kalliope & Linus による星食から見つかった
TYC 1886-01206-1 のコンポーネント
宮下和久
2006.12.31
初稿
2007.1.6
改訂
2006年11月7日、小惑星(22 )Kalliope とその衛星Linusによる恒星1886-01206-1 の星食が日本各地で観測されました。「掩蔽以外の方法で見つかっていた小惑星の衛星による掩蔽の観測成功」は世界初であり、その成果が高く評価されています。
この現象について、せんだい宇宙館の早水勉氏は、国内外の研究者に送るため、観測者に呼びかけてビデオテープおよびCDを収集しました。それらの画像は編集され、デジタルデータ化するために筆者のところに送られてきました。筆者が、これらの画像をLimovieを用いて予備的な解析をおこなったところ、重星と考えられる階段状の光量変化が、全てのビデオ記録から見つかりました。しかし、たいへん近接した重星であるため、互いの回折による光量変化が重なり合って、通常の方法では等級と離角を測定することができません。そこで、Limovieの回折シミュレーションを改良し、二重星についても適用できるようにしました。以下は、その結果の速報です。
図1 Linusによる星食 (柳沢・権正両氏の観測のビデオ) から得られた光量変化
赤く色づけした点が、重星であることを示すステップの部分。出現
が潜入よりも高い位置にあるのは、回折光が重なったためである。
1.小惑星Kalliopeと衛星LinusによるTYC 1886-01206-1の星食の現象の特徴
この現象は、小惑星までの距離は278200000km、小惑星の角速度は0.00445”/sec 、ベッセル基準面上に投影された影の速度は6100m/sec であり、比較的影の速度が遅いことが特徴である。そのため、観測される現象もゆっくりと進行し、回折光の変化のようすをビデオカメラでも詳しくとらえることができる(図1)。したがって、Limovieで光量変化を解析するために好適な対象であるということができる。このグラフから、減光時には全光量のほぼ半分の高さのステップができ、出現時にも3/4の高さの小さな段が形成されていることを読み取ることができる。これは、TYC 1886-01206-1が二重星であることを示している。それぞれのコンポーネントの潜入には約10フィールド(170ミリ秒)の時間差があったものと考えられ、角度にして0.8ミリ秒角ほどであると推定される。しかし潜入時には、それぞれの星の回折光が重なり、現象時刻の差を読み取ることは困難である。そこで、Limovieの持つ回折シミュレーションの機能を二重星のシミュレーションが可能となるように改良し、この現象の解析に用いた。
2.回折シミュレーション
(1) 星食による回折光の変化
点光源の恒星の光を,進行方向に垂直な,充分直線と見なせるような小惑星の縁がさえぎるとき,光の強度I の変
化は次の式で表すことができる。
![]() (1)
(1)
ここで,I0は恒星の光量、,C(ω), S(ω)はフレネル積分で、以下の式で表される。
![]() (2)
(2)
![]() (3)
(3)
また,ωはフレネル数で,以下のように表される。
![]() (4)
(4)
λは光の波長,Dは小惑星までの距離,v はベッセル基準面における小惑星の影の移動速度である。小惑星の縁が進行方向に対して垂直な状態から傾くと、図 に示すように,影(回折パターン)の変化がゆっくり進むようになる。θは、惑星の縁に対して垂直な方向と進行方向とのなす角である。本稿ではθを接地角と呼ぶことにする。
図2 小惑星の影と進行方向に垂直な方向のなす角(接地角)と、回折パターンの変化の速さ
(2) Limovieのシミュレーション機能
Limovieは数値積分により上記の計算をおこない、1ミリ秒ごとの光量を求める。なお,星食観測における対象星の多くは暗い星であり、フィルター等をつけずに撮像することが多い。そこで、シミュレーションにおいても光の波長については400nmから780nmまでを数値積分し、白色光として扱っている。使用されるCCDの分光特性は様々であることから、波長ごとの感度は一定であるとして計算した。また、望遠鏡の口径については、アマチュア観測家が用いる口径は多くの場合50cm以下であるため、考慮に入れていない。
次に、計算値と観測からの測定値を比較し、二乗誤差が最小となるような、タイミングと式(4)におけるθの値を決定する。Limovieはこれらの一連の処理を自動でおこなう機能を持っている。
(3) 重星解析機能の作成
このTYC 1886-01206-1の現象について解析するために、次のような機能を作成した。
(1) コンポーネント間の光量の比と現象の時間差を入力する。
i) コンポーネントの光量比 (R) は、全光量に対する、ステップの高さの比とする。
R = Si / Pi Si : step's hight of luminous intensity (=first appeard star , =secondary hidden star)
ii) 時間差は、ミリ秒で入力する。
(2) 小惑星までの距離とベッセル基準面上に投影された影の速度を入力する。
(3) 光量が25%またはそれ以下の点をクリックすることで、処理の基準点として選択する。
(4) ボタンをクリックすると、上記の条件で作成されたシミュレーションと光量測定値の差の二乗和が最小になるような組み合わせを探し、次の数値を出力する。
i) 現象時刻 それぞれのコンポーネントについて、基準点からのオフセット値(ミリ秒)で示す。
ii) 接地角θ (°)
iii) 差の二乗和
処理量が多くなることから、全てを自動化することはできないが、上記のように光量比と時間差をいくつか仮定してLimovieに計算させ調べていくことで、現象の起こる条件を得ようと考えた。
実際の使用においては、光量比は、潜入か出現のどちらかの時間差が大きく明確なステップが確認できれば、その高さから判断できる。また、時間差は、フレーム数またはフィールド数から見当をつけて設定する。実際に処理してみると、この両者の設定値が適切な数値に近づくと、シミュレーションの曲線が急速に良好な形でフィットしていく。これは、Limovieの自動フィッティング機能が算出する接地角の推定値を含め、観測から得られたグラフを満足する組み合わせは非常に限られたものであることを示しており、これより、重星の離角や位置角・等級を比較的正確に求めることができると考えられる。
なお、この機能は、現在改良中であることから、Ver 0.9.25bに試験的に搭載し、試用していただくことを計画している。
3.TYC 1886-01206-1の星食の解析
ここでは、現在までに得られた解析結果を示す。
(1)光量変化とシミュレーションの比較

図3 潜入時の光量変化とシミュレーションとの比較
撮影: 450mm ニュートン反射 WAT100N Gamma:OFF Gain:Manual
図3は電通大 柳澤氏と権正氏による観測ビデオの光量変化を示す。このビデオ画像はたいへん安定しており、シンチレーションによる振幅も小さい。Limovieの回折シミュレーションは、観測された現象の細部まで描き出すことができた。これによると、ほぼ等しい等級の重星であることがグラフから読み取れる。
(2)コンポーネントの等級
柳澤・権正両氏の観測したビデオは安定した画像であることと、録画時にガンマ補正がなされていないことから、この画像を用いて等級を計算する。特に潜入時はステップが明確であり、等級を求めるのに適している。この現象についてシミュレーションとの比較をおこない、ステップの高さは、全光量の48%であるとするとシミュレーションが観測値によく合う、という結果を得た。これより等級は、先に潜入したコンポーネントが9.8等、後から潜入したコンポーネントが9.9等と求められた。* そこで、この観測において先に潜入した星を主星(コンポーネントa)、後から潜入した星を伴星(コンポーネントb)とし、以下の検討に用いることとする。
表−1 等級の計算
以下は、Occultation Newsletter に掲載されたDave Gault 氏の報告・解説の書式に則って計算した過程を示す。
----------------------------------------------------------------------------
Step is .. 48%
Luminance
of pair = 100
Luminance of first star = 52 Object b
Luminance
of second star = 48 Object a
from the catalogue.... magnitude of
the pair = 9.1
the formula.... m1-m2=2.5*log(b1/b2)
the
difference in magnitude of the two star
is...
ma-mb=2.5*log(52/48)=0.09
if the mag. of the pair is 9.1
then the mag of the first star is
....
m1-9.1=2.5*log(100/52)
m1-9.1=0.71
m1=9.8
then the
magnitude of the second star is = 9.9
これより、各星の等級は、 a=9.8, b=9.9 (mag.) となる。
----------------------------------------------------------------------------
(3)現象時刻の測定
図4 出現時の光量変化とシミュレーションとの比較
この増光は、シミュレーションとの比較の難しかったものの一つである。角度が浅いため変化速度が大きいことに加え、復光後の僅かな変化に追随してしまい、良好な解が得られなかった。比較する点を、増光途中に限ることによって、図のようにきわめてよいフィットの結果を得ることができた。
図4は、出現時の光量変化である。潜入時よりも高いところにステップができているが、これは現象時刻の時間差が小さく、回折光が重なって起こっているものである。そのため、光量変化のグラフを見ただけでは現象時刻を特定することが困難である。そこで、回折シミュレーションとのフィッティングをおこない、それぞれの現象の正確な時刻を求めることを試みた。以下にその結果を示す。
表2 Limovieにより解析された精密な現象時刻
Limovie Analysis
|
Frame No. |
Offset (msec) |
EventTime |
Contact Angle(deg.) |
Event |
|
8666.5 |
-188 |
19:48:00.390 |
28 |
D: lead object |
|
8666.5 |
-1 |
19:48:00.577 |
28 |
D: followed object |
|
8809.5 |
-1 |
19:48:05.358 |
28 |
R: lead object |
|
8809.5 |
+63 |
19:48:05.422 |
28 |
R: followed object |
(4) 位置角と離角の計算
|
|
|
図4、図5で、
ここで、
とおいて、 位置角Pは、
より求められる。 離角a1は、
より求められる。 |
早水氏およびDave
Herald氏の整約結果を参考にすると、小惑星(衛星)と恒星は図5のような位置関係にあったと考えられる。
図5でC1,C2の角は、Limovieで測定した光量変化からシミュレーションとの比較で求めることができる。式(4)におけるθがそれにあたり、Limovieのフィッティングでは、Contact
Angle(接地角)
として求められる。
こうして小惑星の縁の地形(進行方向に対する傾き)がわかれば、重星の離角が微小であることから、食現象は小惑星の縁のほぼ同じ位置で起こったと考えられることから、潜入時と出現時における現象の時間差b1,b2から、位置角と離角を図6のように計算できる。ここでは、小惑星の進行方向の位置角を23°として計算をおこなった。
これまでに解析されたビデオより計算された位置角、離角は次のとおりである。
表3 重星の位置角と離角
|
観測者 |
潜入の時間差(millisec) |
出現の時間差(millisec) |
潜入時の接地角(°) |
出現時の接地角(°) |
位置角(°) |
離 角(°) |
|
冨岡啓行 |
207 |
97 |
50.4 |
57.0 |
281 |
0.60 |
|
佐藤 光 |
268 |
147 |
66.2 |
70.8 |
293 |
0.53 |
|
内山茂男 |
210 |
58 |
68.7 |
68.3 |
302 |
0.42 |
|
柏倉 満 |
828 |
0 |
80 |
43.1 |
290 |
0.78 |
|
北崎勝彦 |
150 |
-97 |
0 |
28.5 |
304 |
0.81 |
|
片山栄作 |
170 |
-92 |
49 |
0 |
301 |
0.52 |
|
柳沢・権正 |
186 |
-58 |
28.0 |
28.0 |
299 |
0.77 |
|
鈴木 智 |
282 |
0 |
48.1 |
47.6 |
294 |
0.86 |
|
平 均 |
|
|
|
|
295 |
0.67 |
図7−1 位置角・離角の計算値(出現順とガンマ補正を考慮してない)
図7−2 解析から得られた位置角と離角(出現順とガンマ補正を考慮して得たもの)
図6の計算から得られた値をグラフに表したところ、最初、図7−1のグラフが得られた。離角は一定の範囲で分布しているのに対し、位置角が明確に2分されている。Linusの観測の3地点で得られた位置角の値のみが90度以下である。整約図 参照:せんだい宇宙館 星食観測のページ を見ると、この3地点は衛星Linusの観測の最も東に位置する地点である。この付近は、特に出現側の角度が浅いことから、図5における星aが星bより先に出現することになる。そのことを考慮しなかったために、この3地点の位置角が異なる値となってしまっていた。
表2および図6−2は、出現順とガンマ補正を考慮して得た位置角・離角である。なお、表2で潜入の時間が負の数になっているのは、星aが先に出現したことを示している。計算値も誤差として理解しやすい分布を示している。
以上より、
位置角 295°+/-8° , 離角 0.67mas +/-0.16mas (mas : milli arc second , ミリ秒角)
を得た。
3.まとめ
Kalliopeおよびその衛星Linusによる星食の観測から、TYC 1886-01206-1が0.67ミリ秒角という近接した重星であることが明らかになった。食現象を記録したビデオから光量の変化を解析し、回折シミュレーションと比較する方法では、現象の時間差を正確に測定することができ、更に接地角を推定することもできる。多地点の観測から得られた整約図を参考に、これらの値を用いて位置角と離角について計算した。この観測と同様に重星であることを示す観測が他にも報告されており、それらに適用することで、離角の小さい重星の検出と位置関係の推定をおこなうことができると考えられる。
この手法を適用するのに際し、注意すべき点として、解析におけるガンマ補正等のビデオカメラの設定について考慮することと、計算処理において、恒星の出現順に留意することである。ガンマ補正については、Limovie0.9.25bの機能であっても、後に潜入する、あるいは先に出現する恒星の値を大きく設定することにより対処することができる。しかし、より正確で安定した解析結果を得るためには、ガンマ補正を逆補正する機能が求められており、今後の課題である。なお、この一連の解析の中で、ゲインが高くサチレーションの起きたビデオを解析したが、ガンマ補正同様にある程度の対処ができ、解析可能であることが確かめられた。現象をとらえることが最優先される星食観測にとって、これらの補正や設定が必要な場面も多く、そういったビデオにも解析時に対応ができることが確認できた意味は大きいと考える。また、恒星の出現順であるが、この減少の場合にはほぼ等光度であったことが考察をややこしくしている。まず、重星としてのステップの見られない現象を探すことが大切である。それは、小惑星の縁と平行に恒星が並んでいる、すなわち、小惑星の縁が位置角を表す、と考えられるからである。その接地角を基準として考察をおこなうことにより、出現順を明確に把握することができる。
以上をまとめると、次のように言うことができる。この手法においては、接地角の大きさは求められるが、左右どちらに傾いているかはわからない。そのために二つの解が得られる場合がある。また、シンチレーションが大きいときも、場合により複数の解が求められることがある。複数の観測について解析と検討をおこなうことに加えて、現象時刻の観測の整約とあわせて検討することにより、より確実で高い精度の測定をおこなうことができると考えられる。
4.それぞれの観測の解析結果
Limovieによる解析のようすを示す。
図7−1 冨岡氏観測のビデオ 潜入時の光量変化
安定した画像であり、シンチレーションによる変化も少ない。後述する北崎氏のビデオもそうであるが、それぞれの星の消失直前につくるピークの間の谷の部分で充分な一致が見られない。これが何を意味するのかは今のところ明らかではない。ガンマ補正等の関係か、あるいは重星に何か他に構成要素がある場合など、様々な理由が考えられる。
図7−2 冨岡氏観測のビデオ 出現時の光量変化
ガンマ補正をHigh で撮影されたとのことである。そこでStep Hight を54%にして近似的に対応したが、安定した画像であるため回折のフィッティングは良好である。ガンマ補正に対しては、シミュレーションの値をガンマ補正して一致させる方法が考えられることから、対応できるかどうか検討していく必要がある。
図8−1 佐藤光氏観測のビデオ 潜入時の光量変化
シンチレーションの影響を比較的強く受けた画像であるが、良好にフィットしており、必要なデータを得ることができた。冨岡氏のビデオと比較しても矛盾のない結果が得られている。これは、現象の時間差、パターンの変化の速度、恒星間の光量の差、と、多くの要素を満たすために光量曲線はユニークな形となるためと考えられる。今後様々な観測に適用できると期待される。
図8−2 佐藤光氏観測のビデオ 出現時の光量変化
富岡氏観測の出現時の光量変化と同様の光量変化曲線が得られた。ただ、この場合、シンチレーションの影響をシミュレーションが拾いやすく、設置角が22度程度と小さい値を示す別解も得られている。ここでは、整約図との整合のよいことから上記のグラフを掲載しておき、今後検討したい。
図9−1 内山茂男氏観測のビデオ 潜入時の光量変化
光量の数値が小さく、ノイズの影響が多いように見えるが、シミュレーションとの一致はたいへんよく、残差(Least Squares)も少ない。 ガンマ補正をOFFに設定されたということで、CCDの値がほぼそのままの比率で出力されているためと考えられる。
図9−2 内山茂男氏観測のビデオ 出現時の光量変化
出現側には、重星であることを示す明瞭な形状(ステップ等)は見られない。曲線の形には現れないが「時間差」の設定値を代えると二乗誤差が変化していく。図のように58ミリ秒の時間差を設定するとグラフとシミュレーション間の一致がよくなる。
いずれにせよ、小惑星の縁に沿って二つの恒星が並んだと考えることができ、この解析において位置角測定の基準を与える光量変化であると考える。
図10−1 柏倉 満氏観測のビデオ 潜入時の光量変化
接食に近い位置での観測である。このように小惑星の縁に対して斜めに潜入・出現がなされるようになると、光量変化の速度がゆっくりになる。このような場合、計算できる点が増える一方で、シンチレーションやノイズの影響も受けやすくなる。そこで、フレーム単位に測光を行い、それらの影響を少なくした。図は、星aの光量を71%として一致がよくなるようにしているが、光量の数値を下げても「時間差」の結果には大きな影響は出ない。シミュレーションはフレームNo.6025およびNo.6042に見られる谷を矛盾なく描いている。
接食に近い位置であるはずだが、接地角は43度と比較的小さい値である。小惑星の縁が不規則な形をしていることを示している。この場合も、シンチレーション等の影響が少ない明瞭なグラフであるにもかかわらず、重星の特徴は見出すことができない。内山氏同様、小惑星の縁に恒星が並んだものと考えられる、貴重な観測となっている。
図中、No.7190フレームから光量がゼロになっているのは、カメラの電源が一時的にOFFになった等が原因と考えられるもので、掩蔽によるものではない。
図10−2 柏倉 満氏観測のビデオ 出現時の光量変化
図11−1 北崎勝彦氏観測のビデオ 潜入時の光量変化
安定したビデオであることから、微妙な光量変化の様子がわかる。シミュレーションともよく一致している。
ガンマ補正に対応するために、後から潜入する星の光量を高めに設定(60%)してフィッティングさせたところ、良好な結果が得られるようになった。No.212フレーム付近で微妙な外れが見られるが、ガンマ補正との関係があるかどうか、検討したいと考えている。
シミュレーションのパターン変化速度は1.0をわずかに超えているが、接地角はほぼ0度で、小惑星の縁に垂直に潜入したと考えられる。
図11−2 北崎勝彦氏観測のビデオ 出現時の光量変化
潜入時同様、たいへん明瞭な光量変化を示しており、シミュレーションとの一致もよい。時間差について明確に求められる現象および観測となっている。位置的に片山氏と近く、双方のデータの一致もよい。
図11−1 片山栄作氏観測のビデオ 潜入時の光量変化
グラフの上が詰まった印象となっているのは、星像が飽和し、サチレーションが起こっているためである。これに対応するために後から潜入した星の光量を高く設定し、残差が最小になるようにした。これにより、サチレーションの影響をある程度相殺することができるはずである。このステップ値を出現時にも用いることで、よりよい一致を得ることができた。
図11−2 片山栄作氏観測のビデオ 出現時の光量変化
出現時も明確に二重星の特徴が現れている。北崎氏の観測から得られた値とよい一致を示し、重星と衛星との位置関係を推定するためにたいへん重要な役割を果たした貴重なビデオである。出現側ではLimusの縁の向きは進行方向にほぼ垂直であったと考えられ、重星のつくる像工途中のピークはたいへん鮮明なものになっている。
図11−1 鈴木 智氏観測のビデオ 潜入時の光量変化
通常、計数誤差は、カウント値の平方根で表される。したがって計数値が小さければ誤差の大きいデータとなるはずであるが、このビデオは、出現時でも光量を示す測定値が200しかないにも関わらず、たいへん美しい光量変化を示している。シミュレーションのフィットもたいへん良好である。これは、ビデオのゲインが小さめであっても、充分よい観測ができることを示している。 41%と小さい「ステップ値」を設定しなければならなかったが、筆者がおこなった恒星の等級とビデオ画像の関係を調べる実験では、光量が小さい部分でも直線関係からの外れがみられるようである。この点についてもこれから検討していかなければならない。
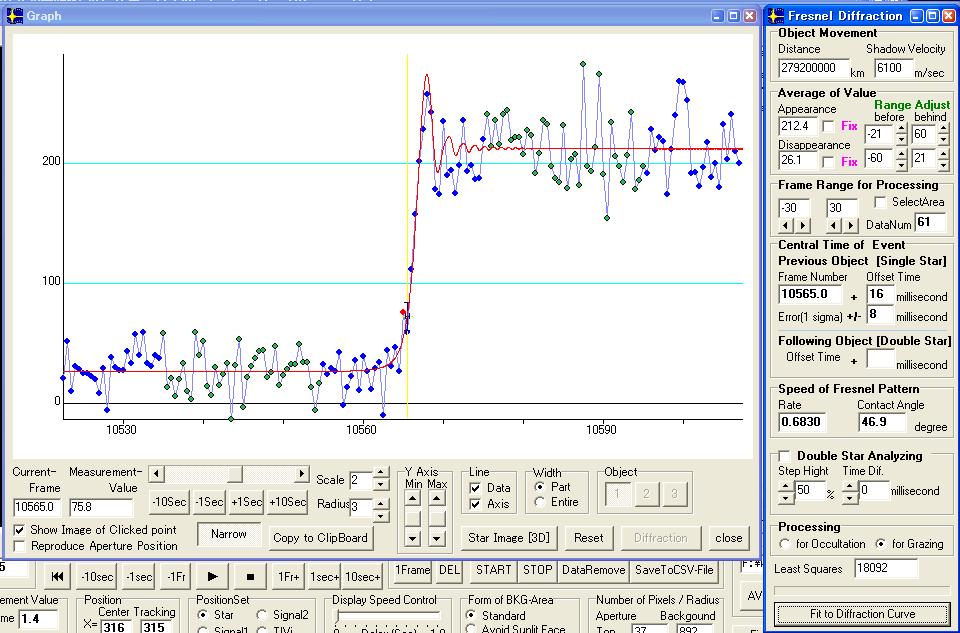
図11−2 鈴木 智氏観測のビデオ 出現時の光量変化
これは、重星の測定に用いられたものではなく、一つの恒星としてのシミュレーションである。つまり、この出現からはまったく重星としての特徴が見られなかったことを意味している。これも、重星の位置角を決めるのに重要な位置を占める観測である。
 図6 位置角、離角の計算
図6 位置角、離角の計算