2007年3月26日の SAO78962 の食の解析
Apr.08 2007
1.概 要
滋賀県守山市の石田正行氏は、氏が観測されLimovieを用いて測光されたSAO78962(XZ10243)の光量変化のデータ(CSVファイル)を、また、東京都練馬区の唐崎秀芳氏は、撮影したビデオ画像をAVIファイルにて、それぞれ送ってくださった。これらのデータについて、Limovieの回折シミュレーション機能を用いて解析をおこない、以下のような結果を得た。
(1)
現象の時間差 :
[滋賀県守山市の観測より]
A-B
: 562msec (0.562秒)
+/-7msec A-C
: 784msec (0.784秒)
+/-17msec
A-B の結果は、予報から期待される値、0.765
秒 に比較的近い値である。
A-C
については、大きな離角に対して現象の時間差が小さいことから、位置角と月縁の方向がほぼ一致していると考えられる。
[東京都練馬区の観測より]
A-B
: 618msec (0.618秒)
+/-6msec
この結果は、予報から期待される値、
0.807
秒 に比較的近い値である。
(2)
主星と伴星の等級 : 主星A
9.97等 伴星B
10.02等 伴星C 11.29等
この結果は、Washington
Double Star Catalog (XZ
Double Star Fileも同じ)
の、
主星A
9.76等、伴星B
10.00等、伴星C
12.5等 と比較的近い値である。
なお、伴星Cの測定値については微光でありシンチレーションやノイズの影響が大きいことから、測定誤差が大きいと考えられる。
(3)
主星Aに対する伴星Bの位置 : 離角 0.267” 位置角 65°
観測された2地点の位置角の差が6°と小さいことから、ある程度大きな誤差を見込む必要があると考えられる。
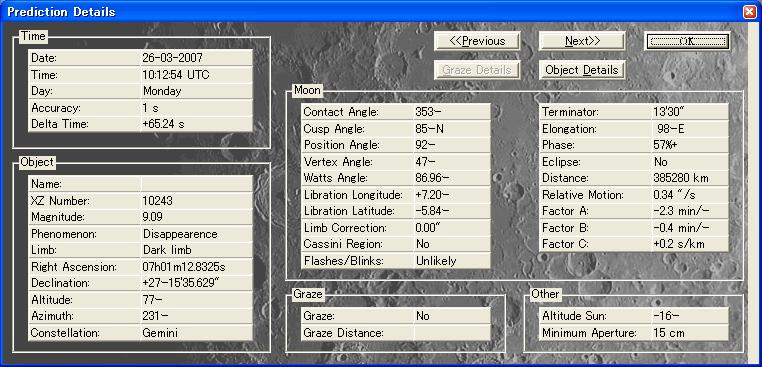
2.現象の予報
Moriyama-City, Shiga-Pref.
Nerima, Tokyo
Fig. 1 Prediction calculated using LOW
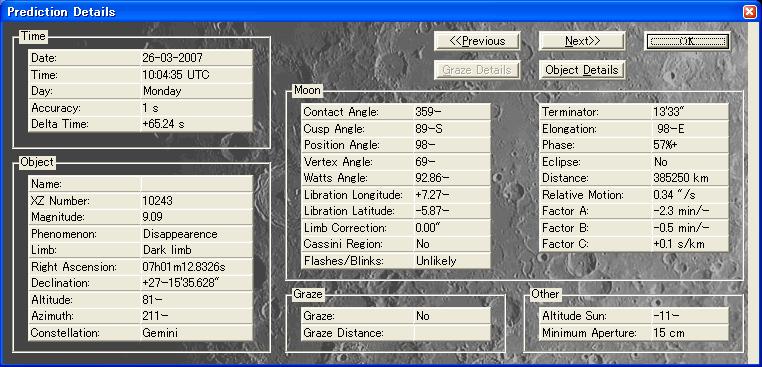
Table -1 Prediction calculated using OCCULT 3.6
for Konohama, Siga-Pref.

for Nerima, Tokyo

Fig. 2 Component's information in XZ double star file
Table 2. Description in Washington Double Star CatalogTable 3. Description in XZ Double Star File
|
Table 4 TYCHO2 Catalog
|
Fig.3 Position and Separation, constructed using Cartes du Ciel |
3.測定とシミュレーション
[1] 滋賀県守山市の観測について
表2より、シミュレーションに必要なパラメータを計算すると、
Va : 月の移動方向の角速度 (“/sec), CCT : Contact Angle, RV : 月縁に垂直な方向の角速度成分
Ds : 月までの距離 とすると、月の月の移動速度 V (m/sec) は、次のように求められる。
RV = cos(CCT)* Va より
Va
= RV / abs(cos(CCT))
= 0.343 / abs(cos(+7))
= 0.3457 ("/sec)
V = Ds*π*Va/(180*3600)
Ds = 385250 (km)
V
= 385250 *0.3457 *pi()/(180*3600)
= 645 m/sec
以上より、フィッティングをおこなう。
Limovieの「重星解析機能」は、三重星には対応していない。それぞれの現象について、通常の星食と同じように解析を行った。現象前後とステップの光量については、Limovieが算出する平均値を元に計算することができる。
Fig.4 Limovie analysis (First star is disappeared)
以下、No.316フレームを基準(フレーム中央時刻を0(基準))として、時刻を表現する。
現象時刻 No.316 Frame - 5 ミリ秒 誤差 +/- 5 ミリ秒
Fig.5 Limovie analysis (Second star is disappeared)
At the background, a few points are selected to avoid the influence of the lunar face illuminated by earth shine.
現象時刻 No.333 Frame - 10 ミリ秒 誤差 +/- 2 ミリ秒
= No.316 + Frame 557 ミリ秒 誤差 +/- 2ミリ秒
Fig.6 Limovie analysis (Third star is disappeared)
At the background, a few points are selected to avoid the influence of the lunar face illuminated by earth shine.
現象時刻 No.340 Frame - 22 ミリ秒 誤差 +/- 12 ミリ秒
= No.316 Frame +779 ミリ秒 誤差 +/- 12ミリ秒
以上より、現象の時間差は、
主星A-伴星B : 562 ミリ秒 +/-7ミリ秒 である。
主星A-伴星C : 784 ミリ秒 +/-17ミリ秒 である。
[2] 東京都練馬区の観測について
表2より、シミュレーションに必要なパラメータを計算すると、
Va : 月の移動方向の角速度 (“/sec), CCT : Contact Angle, RV : 月縁に垂直な方向の角速度成分
Ds : 月までの距離 とすると、月の月の移動速度 V (m/sec) は、次のように求められる。
RV = cos(CCT)* Va より
Va
= RV / abs(cos(CCT))
= 0.342 / abs(cos(+14))
= 0.3524 ("/sec)
V = Ds*π*Va/(180*3600)
Ds = 385280 (km)
V
= 385250 *0.3457 *pi()/(180*3600)
= 658 m/sec
以上より、フィッティングをおこなう。
星像が淡くピクセル輝度が小さいことから、フレーム単位の測光とした。また、第3のコンポーネント(C)による変化が見られないことから、重星解析機能を用いた。
これにより現象時刻は、
フレーム中央時刻 19h12m55.32sより、
先行して潜入したコンポーネント: 19h12m55.32s - 608msec = 19h12m54.71s
後から潜入したコンポーネント :
19h12m55.32s
+ 10msec = 19h12m55.33s
現象の時間差 :
618msec(0.618秒)
3.現象の時間差と、コンポーネントの位置
[1]
滋賀県における観測
OCCULTの予報より、
RV(Radial Velocity) = 0.343”
であるから、離角の、月縁の位置角の方向の成分は、
主星A-伴星B : 0.343 * 0.562 = 0.193”
主星A-伴星C : 0.343 * 0.784 = 0.269”
である。
OCCULTの予報とともに、この数値を用いて現象の時間差を計算する。
Separation = 0.3”, Position Angle = 69°
主星A-伴星Bについて
重星の位置角69° および 現象の位置角98度、重星の離角0.3”より、
重星の位置角 - 月縁上の位置角 = 69-98 = -29°
OCCULTの予報より、 Radial Velocity (Rv)=0.343"/sec であるから、
期待されるコンポーネント間の現象時間差 T は、
cos(29°) = 0.343*T/0.3
T = cos(29°)*0.3/0.343
T = 0.765 秒
と計算される。
一方、観測からは、既に述べたようにLimovieの重星シミュレーションから、時間差として 562msec (0.562秒) が求められている。これらの数値は比較的よい一致を示す。
主星A-伴星Cについて
重星の位置角194° および 現象の位置角98度、重星の離角31”より、
重星の位置角 - 月縁上の位置角 = 194-98 = 96°
OCCULTの予報より、 Radial Velocity (Rv)=0.343"/sec であるから、
期待されるコンポーネント間の現象時間差 T は、
cos(96°) = 0.343*T/31
T = cos(96°)*31/0.343
T = 9.447 秒
と計算される。
一方、観測からは、既に述べたようにLimovieの重星シミュレーションから、時間差として 784msec (0.784秒) が求められており、大きく異なっている。これは、主星Aと伴星Cを結ぶ直線が月縁とほぼ平行であるため、僅かな位置角の差でも大きな時間差となって現れるためであると考えられる。ここで、カタログ記載の離角31”が正しいと仮定して位置角を推定すると、
cos(PA[DS]-PA[ML]) = RV * T / Sep より、
cos(PA[DS]-PA[ML]) = 0.343 * 0.784 / 31 = 0.99999998853
PA[DS]-PA[ML] = 0.0087”
となる。いずれにせよ、月縁の方向と位置角がきわめてよく一致していたと考えられることから、月縁図等を参考にすれば正確な位置角を求めることができると考えられる。
[2] 練馬区の観測より
OCCULTの予報より、
RV(Radial Velocity) = 0.342”
であるから、離角の、月縁の位置角の方向の成分は、
主星A-伴星B : 0.342 * 0.618 = 0.211”
である。
主星A-伴星Bについて
重星の位置角69° および 現象の位置角92度、重星の離角0.3”より、
重星の位置角 - 月縁上の位置角 = 69-92 = -23°
OCCULTの予報より、 Radial Velocity (Rv)=0.342"/sec であるから、
期待されるコンポーネント間の現象時間差 T は、
cos(29°) = 0.342*T/0.3
T = cos(23°)*0.3/0.342
T = 0.807 秒
と計算される。
一方、観測からは、既に述べたようにLimovieの重星シミュレーションから、時間差として 618msec (0.618秒) が求められている。これらの数値は比較的よい一致を示す。
[3] コンポーネントの位置の推定
三重星SAO78233
- X86324の解析
の 図6および導出過程に示す式 (6)
にもとづいて計算をおこなう。
この場合は、位置角が90°<PA<180°であるから、位置関係は図6の上下方向の鏡像となり、
式(6)より求められた計算値をPA'とすると、位置角PAは、
PA = 180 - PA' として求められる。
この場合はb1>b2であるから、
tanA = sinC/(b1/b2 - cosC) –(5)
C=6°
b1=0.211”
b2=0.193”
より、
tanA = sin6°/(0.211/0.193 – cos6°)
=1.059
A=46.6
PA'=90+p2-A
=90+82-46.6=125.4
PA = 180 - 125.4 = 64.6°
離角aは、
a= b2/sinA = 0.193/sin(46.6°) = 0.267”
以上より、コンポーネントA,Bについては、
|
|
離角 |
位置角 |
|
観測値 |
0.267” |
65° |
|
カタログの記載 |
0.3” |
69° |
2つの観測地点の位置角の差が小さいことから確実な推定ではないと考えられるが、カタログの記載と近い結果が得られた。
4.コンポーネントの等級
Limovieはフィッティング時に現象前後のそれぞれについて、選択したフレームの光量の平均を算出する機能を持つ。
これを利用すると、等級の見積もりに際して、表計算ソフトを用いる必要はない。
Limovieによる光量測定値は、
ペア = 655.5
ステップ2 = 370.4
ステップ1 = 98.2
バックグラウンド = 14.1
月縁上の位置角が45°<PA<135°であることから、先に潜入した星が西側であるとして扱うことにすると、
西にあるコンポーネントは東側のものより明るい。
ということができる。
主星Aの光量は 655.5 - 370.4 = 284.6 units
伴星Bの光量は 370.4 - 98.2 = 272.2 units
伴星Cの光量は 98.2 - 14.1 = 84.1 units
3者の合成光量は 655.5 - 14.1 = 641.4 units
カタログより、合成等級は 9.09 (Tycho 2 TYC 1903-1601-1)
等級を計算する式.... m1-m2=2.5*log(b1/b2)
2つの星の等級の差は、
主星Aと伴星Bについて、
m1-m2 = 2.5*log(284.6/272.2) = 0.05
主星Aと伴星Cについて、
m1-m2 = 2.5*log(284.6/84.1) = 1.32
ここで、合成等級を 9.09等 であると仮定すると、主星は、
m1-9.09=2.5*log(641.4/284.6)
m1-9.09=0.88
m1=9.97
これより、
伴星Bの等級は、9.97+0.05=10.02
伴星Cの等級は、9.97+1.32=11.29
以上より、
主星A = 9.97 等
伴星B = 10.02 等
伴星C = 11.29 等
を得た。
Washington Double Star Catalog(XZ Double Star Fileも同じ) によると、
A=9.76等、B=10.00等、C=12.5等とされている。
A,Bについては同様の結果が得られたが、Cについては異なる結果となっている。ただし、シンチレーションやノイズの多いビデオからの測定であり、微光の天体であるCの光量については測定の誤差も大きいと考えられることから、この測定値は参考として扱われるべきものと考える。